

info@gerb.com
กรณีศึกษาเกี่ยวกับเทคโนโลยีการหน่วงแรงสั่นสะเทือนสำหรับอาคารสูง: ความสบายและความปลอดภัย
แนวทางสำหรับระบบหน่วงการสั่นสะเทือนของสมาคมอาคารสูงและการอยู่อาศัยในเขตเมือง (Council on Tall Buildings and Urban Habitat, CTBUH)
หอทดสอบ Thyssen Krupp เมือง Rottweil ประเทศเยอรมนี
รายละเอียดโครงการ
- ปีที่สร้างเสร็จ:
2016 (โครงสร้างชั้นสูงสุด) - ผู้พัฒนา/ผู้รับเหมา/เจ้าของ:
Krupp Hoesch Stahl GmbH / Thyssen Krupp Elevators - สถาปนิก:
Werner Sobek ร่วมกับ JAHN Architects สาขาสตุทการ์ทและชิคาโก - วิศวกรโยธา:
Werner Sobek จากสตุทการ์ท - ผู้จัดจำหน่ายอุปกรณ์หน่วงการสั่นสะเทือน:
GERB Vibration Control Systems - ห้องปฏิบัติการที่ทำการทดสอบ:
Wacker Ingenieure (วิศวกรรมลม / การทดสอบในอุโมงค์ลม) - ความสูง / ความสูงระหว่างชั้น:
246 ม. / 3.3 ม. (พื้นที่สำนักงาน) - อัตราส่วนความชะลูด:
1/11.8 - จำนวนชั้น:
27 ชั้น / พื้นที่สำนักงาน 8 ชั้น - พื้นที่ทั้งหมดของอาคาร:
340 ตารางเมตร - หน้าที่ใช้สอยของอาคาร:
หอทดสอบลิฟต์ / สำนักงาน / ดาดฟ้าสำหรับสังเกตการณ์ (232 ม.) - วัสดุโครงสร้าง:
คอนกรีดอัดแรง (C50/60) / เปลือกอาคารด้วยแผ่นผนังพอลิเตตระฟลูออโรเอทิลีน (PTFE) บนโครงสร้างเหล็ก - ระบบโครงสร้าง:
แกนรับน้ำหนักคอนกรีตเสริมเหล็กที่ยื่นออกมาจากฐานรากแพ
(- 32 ม.) - กลยุทธ์การหน่วงแรงสั่นสะเทือนที่ใช้:
ระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (240 ตัน)

1.0 บทนำ/ประวัติความเป็นมา
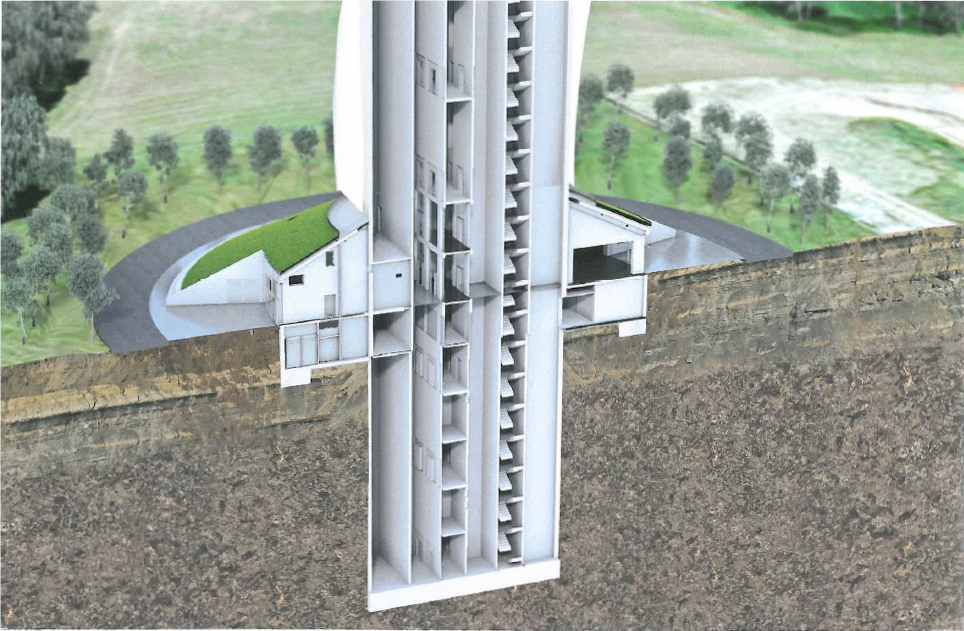
หอสูง 246 ม. นี้ตั้งอยู่ในภาคตะวันตกเฉียงใต้ของประเทศเยอรมนี โดยสร้างขึ้นเพื่อเป็นอาคารสำหรับทดสอบนวัตกรรมของลิฟต์ หอนี้มีผังอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 20 ม. และมีพื้นที่ปล่องลิฟต์สำหรับทดสอบลิฟต์ได้ 9 ตัว ลิฟต์สำหรับใช้ในกรณีเพลิงไหม้หนึ่งตัว และลิฟต์แก้วที่เห็นทิวทัศน์ได้ในมุมกว้างอีกหนึ่งตัว นอกจากนี้ยังมีปล่องสูง 220 ม. อีกหนึ่งปล่องที่สามารถใช้เป็นปล่องลิฟต์เชิงกลเพื่อรับรองโปรแกรมทดสอบด้วย
ฐานอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 40 ม. ซึ่งเป็นพื้นที่เพิ่มเติมสำหรับงานระบบอาคาร โถงต้อนรับ และศูนย์ศึกษา ที่ความสูง 232 ม. มีดาดฟ้าสำหรับสังเกตการณ์ที่สูงที่สุดในประเทศเยอรมนี สามารถมองเห็นทิวทัศน์ที่งดงามของป่าดำและเห็นไปถึงเทือกเขาแอลป์ในวันที่อากาศแจ่มใส

2.0 ระบบโครงสร้าง
ระบบโครงสร้างของหอทดสอบเป็นท่อคอนกรีตอัดแรงที่มีเส้นผ่าศูนย์กลาง 20.8 ม. ปักยึดแน่นเข้าไปในดินลึก 30 ม. (ดูรูปที่ 2) ผนังท่อนี้มีความหนา 40 ซม. จากฐานถึงความสูงที่ระดับ 110 ม. และจากระดับความสูงดังกล่าวเป็นต้นไปผนังท่อจะหนา 25 ซม. ดินในบริเวณนั้นเป็นชั้นหินแข็งที่เรียกว่า Keuper และมีชั้นหินปูนที่เกิดจากการทับถมของเปลือกหอยในยุคดึกดำบรรพ์อยู่ด้านใต้ ทำให้สามารถรับน้ำหนักได้สูง จึงไม่จำเป็นต้องมีการตอกเสาเข็มก่อนวางฐานราก นอกจากดินในบริเวณโดยรอบจะยึดให้หอตั้งอยู่อย่างมั่นคงแล้ว โครงสร้างฐานที่กว้างของหอก็ช่วยเสริมความแข็งแกร่งด้านข้างให้กับหอด้วย
การเสริมความแข็งแกร่งภายในของท่อคอนกรีตส่วนใหญ่เกิดจากผนังด้านในของปล่องลิฟต์ มีการติดตั้งแผ่นฝ้าเพดานสำเร็จรูปไว้ที่บางระดับความสูงเพื่อให้สามารถเข้าถึงปล่องลิฟต์ได้ ปล่องลิฟต์บางปล่องสิ้นสุดที่ระดับความสูง 115 ม. และปิดด้วยแผ่นพื้นช่วงพาดยาวหนา 40 ซม. ซึ่งเป็นพื้นแบบหล่อในที่ ชั้นอาคารเหล่านี้ใช้เป็นพื้นที่สำนักงาน ถัดขึ้นไปด้านบนเป็นพื้นที่ว่างเปล่าจนถึงที่ระดับความสูง 197 ม. ซึ่งใช้เป็นพื้นที่กักเก็บความร้อนและพื้นที่สำหรับระบบมวลหน่วงปรับค่า (TMD) ส่วนบนสุดของหอใช้เป็นพื้นที่สำนักงานและพื้นที่สำหรับปล่องลิฟต์ที่เหลือ
องค์ประกอบที่โดดเด่นของหอทดสอบนี้คือผนังด้านนอกของอาคารที่ทำจากแผ่นตาข่ายใยแก้วเคลือบด้วยพอลิเตตระฟลูออโรเอทิลีน (PTFE) ช่องตาข่ายกว้างขึ้นตามความสูงที่เพิ่มขึ้นของอาคาร โดยยิ่งสูงก็จะยิ่งโปร่งมากขึ้น ซึ่งช่วยลดความหนาแน่นและน้ำหนักของวัสดุและลดแรงต้านอากาศ
รูปทรงที่เป็นเกลียวของผนังด้านนอกของอาคารทำหน้าที่เป็นเกลียวลดการสั่นสะเทือนหรือเกลียว Scruton และตัวแผ่นผนังเองช่วยให้ร่มเงาแก่โครงสร้างคอนกรีตเพื่อหลีกเลี่ยงความเค้นที่เกิดจากความร้อนของแสงอาทิตย์ การออกแบบและการเลือกใช้วัสดุของผนังด้านนอกของอาคารคำนึงถึงการติดตั้ง การบำรุงรักษา ความคงทน และการรับแรงลม
3.0 ขั้นตอนการก่อสร้าง

การก่อสร้างหอทดสอบมีขั้นตอนดังต่อไปนี้:
- การขุดหลุมกลมลึก 30 ม. เพื่อวางฐานรากของอาคาร การขุดหลุมกลมนี้ทำได้โดยการวางระเบิด หลังจากขุดหลุมแล้ว มีการยึดไม่ให้ดินถล่มลงมาด้วยการฝังสมอยึดดินและการพ่นคอนกรีต
- การเทฐานรากแพ
- การก่อสร้างโครงสร้างคอนกรีตในแนวตั้งใช้การหล่อคอนกรีตแบบเลื่อน โดยมีการสร้างผนังทั้งหมดอย่างต่อเนื่องเป็นเวลา 4 เดือน
- การก่อสร้างแผ่นพื้น
- การก่อสร้างบริเวณทางเข้า
4.0 การตอบสนองทางพลศาสตร์ต่อแรงลมที่คาดไว้
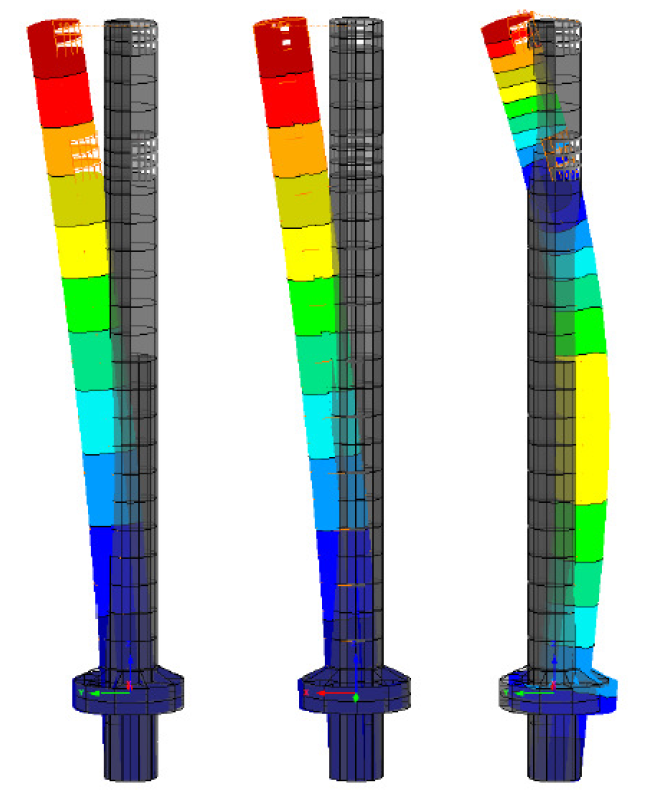
ความถี่พื้นฐานของหอทดสอบคาดว่าจะอยู่ในช่วง 0.17 Hz – 0.20 Hz ต่อวินาที โดยขึ้นอยู่กับขั้นตอนการก่อสร้างและสถานะของคอนกรีต (แตกร้าว/ไม่แตกร้าว) – ดูรูปที่ 4
การวิเคราะห์ลมพบว่าจะเกิดการสั่นของโครงสร้างที่ความเร็วลมที่ตรงกับค่าความเร็วลมที่ระดับพื้นดิน (ความสูง 10 ม.) ซึ่งก็คือในช่วง 55 – 60 กม./ชม. หากไม่มีการหน่วงแรงสั่นสะเทือนเพิ่มเติม คาดว่าการสั่นของโครงสร้างนี้จะทำให้ส่วนบนของอาคารเบี่ยงจากตำแหน่งเดิมไปประมาณ +/- 750 มม. ซึ่งนอกจากจะทำให้ผู้คนในอาคารรู้สึกไม่สบายแล้ว ยังทำให้โครงสร้างคอนกรีตของอาคารเกิดความล้าเป็นอย่างมากด้วย ซึ่งจะลดอายุการใช้งานของโครงสร้าง (ดูรูปที่ 5) เพื่อลดการตอบสนองทางพลศาสตร์ที่มีต่อการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้าง จึงมีการใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ เนื่องจากอาคารนี้จะใช้เป็นหอทดสอบความไวของอุปกรณ์ลิฟต์ที่มีต่อการแกว่งของอาคาร เจ้าของโครงการจึงมองหาความเป็นไปได้ที่จะ
กระตุ้นอาคารให้แกว่งเทียมในวันที่ลมสงบ ซึ่งทำให้เกิดการขจัดที่ไม่ก่อให้เกิดปัญหาเรื่องความล้า ระดับการแกว่งเทียมตามคำขอของเจ้าของโครงการและถือว่าปลอดภัยคือประมาณ +/- 200 มม. คำขอของเจ้าของโครงการนี้เป็นโอกาสที่หาได้ยากในการใช้ตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (Hybrid Mass Damper, HMD) หรือที่เรียกว่า มวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) เนื่องจากระบบการออกแบบแตกต่างไปจากระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริดอื่นๆ ที่เคยใช้ในอดีต ในบทถัดไปจะมีการนำเสนอข้อมูลเกี่ยวกับระบบนี้ รวมถึงการปรับแต่งระบบแพสซีฟ การออกแบบกลไกหัวขับ ขั้นตอนวิธีการควบคุม และแนวคิดด้านความปลอดภัย

5.0 การปรับแต่งระบบมวลหน่วงปรับค่าแบบแพสซีฟ
ต้องระบุตัวแปรของระบบมวลหน่วงปรับค่าแบบแพสซีฟโดยคำนึงถึงสามประเด็น ได้แก่ ก) เพื่อให้การหน่วงแรงสั่นสะเทือนเพิ่มเติมแก่โครงสร้างอย่างเพียงพอ เพื่อลดการตอบสนองทางพลศาสตร์ที่เกิดจากการสั่นเมื่อมีกระแสลมไหลวน ข) เพื่อจำกัดการเคลื่อนที่ของมวลหลักของมวลหน่วงปรับค่าในการสั่นแพสซีฟที่เกิดขึ้นให้อยู่ในค่าที่เป็นไปได้และสมเหตุสมผล สำหรับเวลาที่เกิดการสั่นเนื่องจากแรงลมกรรโชกที่มาปะทะด้านข้าง และ ค) เพื่อเลือกมวลหน่วงปรับค่าให้สอดคล้องข้อมูลของพลังงานที่จะทำให้เกิดการเบี่ยงสูงสุดจากตำแหน่งเดิมของอาคารในการสั่นกระตุ้น โดยพิจารณาประสิทธิภาพในการต้านแรงลมที่เกิดขึ้นจากหัวขับที่มี
(หรือ แรงสูงสุดที่เกิดขึ้นและช่วงจังหวะชักสูงสุดในระหว่างการปฏิบัติงาน) มีการใช้แบบจำลองทางคณิตศาสตร์เพื่อปรับแต่งระบบมวลหน่วงปรับค่า ซึ่งแสดงถึงการกระจายมวลน้ำหนักของอาคารและโมเมนต์ความเฉื่อยของมวลตามที่รายงานไว้ในคุณสมบัติทางโครงสร้างที่กำหนด องค์ประกอบเพื่อความแข็งแกร่งระหว่างพื้นอาคารได้รับการออกแบบมาให้สอดคล้องกับรูปแบบการสั่นและความถี่ธรรมชาติที่ได้จากการสังเกตการณ์อย่างเต็มรูปแบบ รูปที่ 6 ซ้าย แสดงรูปแบบการสั่นและความถี่ธรรมชาติของแบบจำลองเปรียบเทียบที่ใช้ นอกจากนี้ รูปที่ 6 ซ้าย ยังแสดงรูปแบบการสั่นของแบบจำลองเปรียบเทียบโดยเทียบกับต้นแบบอย่างละเอียดของที่จัดทำโดยปรึกษาด้านโครงสร้างด้วย
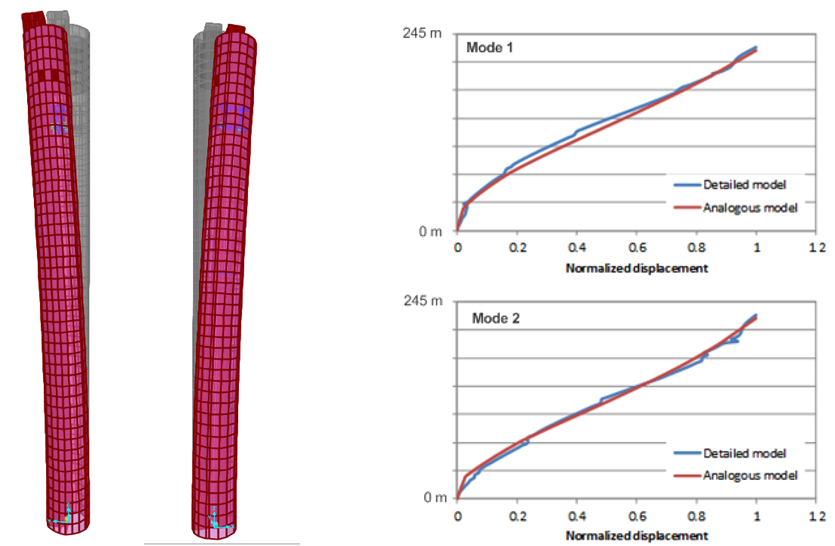
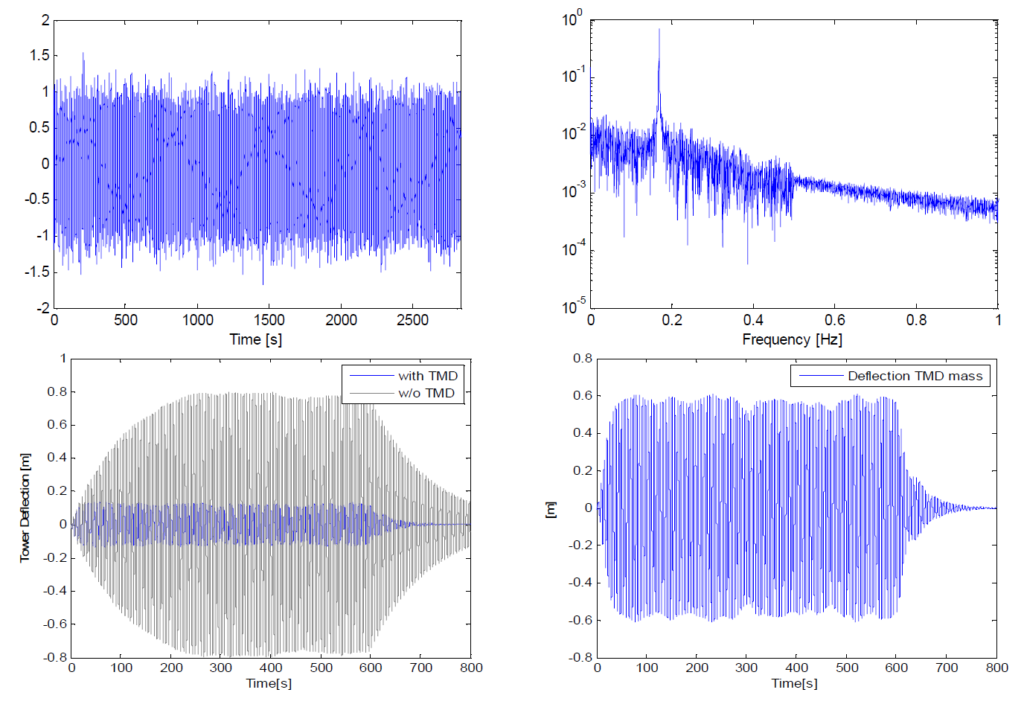
นอกจากนี้ ยังมีการสร้างแบบจำลองมวลหน่วงปรับค่าแยกต่างหากให้เป็นระบบลูกตุ้มที่สามารถจับตำแหน่งเยื้องศูนย์กลางของตัวมวลเองในหออาคารได้ด้วย คุณลักษณะของน้ำหนักกระทำสำหรับควบคุมแรงป้อนที่มากระทำหรือการสั่นของโครงสร้างเนื่องจากกระแสลมไหลวนก็เหมือนกับการกระตุ้นให้เกิดการสั่นด้วยการเคลื่อนที่แบบฮาร์มอนิกอย่างง่าย อย่างไรก็ตาม แรงลมกรรโชกที่มีอยู่เป็นลักษณะตามธรรมชาติที่เกิดขึ้นแบบสุ่ม ดังนั้นจึงต้องใช้เกณฑ์ในการปรับแต่งอื่นที่นอกเหนือจากเกณฑ์ Den Hartog อันเป็นที่รู้จักกันดี นอกจากนี้ การเคลื่อนที่สัมพัทธ์ของมวลหน่วงปรับค่าของแรงลมแบบสุ่มยังมากกว่าแบบฮาร์มอนิกด้วย การกำหนดค่าตัวเลขของตัวแปรที่เหมาะสมของมวลหน่วงปรับค่าควรพิจารณาแรงลมที่ใกล้เคียงกับความเป็นจริงมากที่สุด บันทึกเวลาที่สร้างขึ้นมีทั้งแรงลมกรรโชกแบบสุ่ม (ตามสเปกตรัม Davenport) และการสั่นที่มีความถี่ตรงกัน กระแสลมไหลวน ส่วนประกอบที่แสดงถึงการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้างโดยรวม (ดูรูปที่ 3 ขวา) การลดการเบี่ยงจากตำแหน่งเดิมของอาคารเกิดจากระบบมวลหน่วงปรับค่าแบบแพสซีฟที่ปรับแต่งแล้ว และการขจัดของมวลหน่วงปรับค่าที่เกิดขึ้นแสดงอยู่ในรูปที่ 3 ขวา
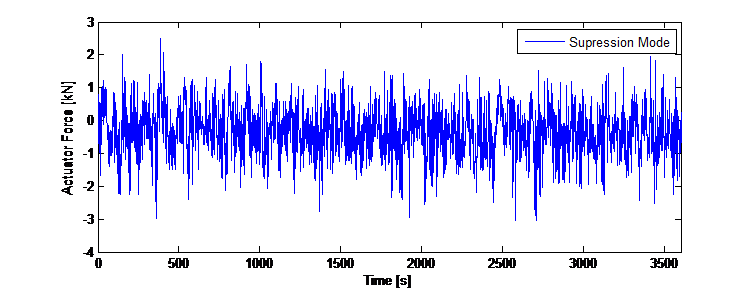
จากผลการทดสอบเหล่านี้ที่มีค่าการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้างโดยประมาณ ξ=0.8 % สามารถระบุได้ว่าต้องใช้มวลหน่วงปรับค่าหนัก 240 ตันเพื่อให้ได้การขจัดในขอบเขต +/- 650 มม. โดยที่ยังคงรักษาอัตราการหน่วงของมวลหน่วงปรับค่าไว้ได้ในระดับที่เหมาะสม เพื่อให้มวลหน่วงปรับค่ามีประสิทธิภาพสูงสุด การหน่วงที่เพิ่มขึ้นของมวลหน่วงปรับค่าจะช่วยลดระยะการเคลื่อนที่พร้อมทั้งยังคงมีสมรรถนะที่เพียงพอ แต่อาจส่งผลเสียต่อแรงที่เกิดจากหัวขับ เพื่อระบุแรงที่ต้องใช้ให้การปรับตั้งมวลหน่วงปรับค่าขนาด 240 ตันให้เหมาะสม จึงมีการใช้แบบจำลองเปรียบเทียบเพื่อตรวจสอบว่า ด้วยแรงสูงสุด 40 กิโลนิวตันจากหัวขับ อาคารจะเบี่ยงจากตำแหน่งเดิมในช่วง +/- 200 มม. ได้หรือไม่ รูปที่ 4 แสดงผลของการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลาบนแบบจำลองเปรียบเทียบทางคณิตศาสตร์ ซึ่งในที่นี่แสดงการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคารที่เกิดขึ้น การเบี่ยงจากตำแหน่งเดิมของมวลหน่วงปรับค่า และแรงอินพุตกระทำอย่างต่อเนื่องที่เป็นสาเหตุของการเบี่ยงจากตำแหน่งเดิมดังกล่าว


6.0 คำอธิบายระบบควบคุม
การทำงานเป็นคู่ของระบบควบคุมตอบโจทย์ ก) วัตถุประสงค์ในลดการใช้พลังงานในขณะทำงานแบบแพสซีฟตามปกติเพื่อลดแรงสั่นสะเทือนที่เกิดขึ้น ข) วัตถุประสงค์ในการลดแรงที่หัวขับต้องใช้ด้วยการใช้ปรากฏการณ์เรโซแนนซ์เพื่อกระตุ้นมวลหน่วงปรับค่าหลักให้ได้แรงจริงสูงสุดตามที่ต้องการ ดังนั้นเมื่อเทียบกับระบบควบคุมอื่นๆ (ดูรูปที่ 1) หัวขับจะเชื่อมต่อโครงสร้างหลักและมวลหน่วงปรับค่าเข้าด้วยกัน แต่ไม่ใช้เพื่อควบคุมมวลหน่วงปรับค่าโดยตรง มิฉะนั้นจะกลายเป็นระบบตัวขับมวลแบบแอคทีฟ (Active Mass Driver) หรือตัวหน่วงทั่วไป
สำหรับมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ที่ใช้ อาคารนี้เลือกใช้มวลตอบสนองสำหรับการทำงานแบบแพสซีฟที่มีน้ำหนัก 240 ตัน สำหรับการสั่นกระตุ้นมีหัวขับเชิงเส้นสองหัว หนึ่งหัวต่อหนึ่งทิศทางหลัก ซึ่งยึดติดอยู่กับมวลหน่วงปรับค่าด้วยข้อต่อหมุนใกล้กับจุดศูนย์ถ่วงของมวลเพื่อหลีกเลี่ยงแรงบิดที่ไม่พึงประสงค์ หัวขับเชิงเส้นแต่ละตัวสามารถสร้างแรงได้ถึง 40 กิโลนิวตันได้ภายในช่วงชักสูงสุด +/- 600 มม. เพียงช่วงเดียว (ดูรายละเอียดในรูปที่ 2) หัวขับเชิงเส้นสามารถถอดออกได้ ดังนั้นการสั่นแบบแพสซีฟทั้งหมดจะไม่ได้รับผลกระทบจากตลับลูกปืนของหัวขับในกรณีที่ตลับลูกปืนเกิดความขัดข้อง ซึ่งเป็นกรณีที่เกิดขึ้นได้ยาก
รูปที่ 10 – ประเภทของระบบควบคุม – มวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) เทียบกับระบบแพสซีฟ กึ่งแอคทีฟ แอคทีฟและไฮบริด
ระบบประกอบด้วยมาตรวัดความเร่งแกนเดียวสี่ตัว (คานรูปตัว K สำหรับรับแรงแผ่นดินไหว/MEMS หนึ่งคานต่อหนึ่งทิศทาง) เพื่อระบุระดับสูงสุดของอาคารและความเร่งของมวลหน่วงปรับค่า สัญญาณความเร่งจะถูกกรองความถี่ภายในช่วงความถี่ธรรมชาติพื้นฐานของอาคาร (0.1 – 0.3 Hz) และหาค่าปริพันธ์เพื่อให้ความเร็วและการเบี่ยงจากตำแหน่งเดิมแก่อาคาร
นอกจากนี้ ค่าการขจัดที่หาค่าปริพันธ์แล้วสามารถนำไปเปรียบเทียบกับค่าที่วัดได้จากระบบนำทางด้วยดาวเทียมที่ติดตั้งเสริมไว้ที่ด้านบนสุดได้ด้วย เพื่อเปรียบเทียบค่าคลาดเคลื่อนของสัญญาณ จากนั้นจะทำการทดสอบสหสัมพันธ์ตามข้อมูลที่ได้ นอกจากนี้ มีการควบคุมการขจัดของมวลหน่วงปรับค่าโดยตรงด้วยอุปกรณ์แปลงพลังงานหรือทรานสดิวเซอร์แบบขดลวดและระบบวัดความยาวแบบเหนี่ยวนำที่อยู่ในมอเตอร์เชิงเส้น
7.0 ขั้นตอนวิธีการควบคุม
วงจรการควบคุมทั่วไปของอาคารแสดงไว้ในรูปที่ 5 ซึ่งแสดงลำดับการควบคุมแบบวงจรปิด การออกแบบอย่างละเอียดของขั้นตอนวิธีการควบคุมจะต้องมีแบบจำลองเชิงวิเคราะห์ของปฏิสัมพันธ์ระหว่างหัวขับกับมวลหน่วงปรับค่า เพื่อระบุความสัมพันธ์ระหว่างอินพุตแรงจากหัวขับและแรงกระทำที่ใช้ ซึ่งต้องใช้ร่วมกับแบบจำลองเชิงวิเคราะห์ของโครงสร้างหลักที่อธิบายพฤติกรรมเชิงพลศาสตร์โดยรวมของอาคาร นอกจากนี้ เมื่อเปรียบเทียบกับขั้นตอนวิธีการควบคุมมาตรฐานที่ใช้กับตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (HMD) เช่น ใน [2],[3] หรือที่ได้รับการตรวจสอบทางทฤษฎีแล้วอย่างใน [1] ขั้นตอนวิธีการควบคุมที่ใช้กับอาคารนี้จึงต้องคำนึงถึงการกระตุ้นที่ได้รับการควบคุมแบบประสานเวลาในทิศทางหลักเพียงทิศทางเดียวและการลดแรงสั่นสะเทือนในทิศทางตั้งฉาก เนื่องจากมีการคาดว่าการตอบสนองทางพลศาสตร์ส่วนใหญ่จะเกิดขึ้นในการสั่นพื้นฐาน ทั้งสองงานจึงควรใช้การควบคุมสัญญาณตอบกลับเชิงเส้นรวมทั้งประโยชน์ทั้งหมดของการควบคุมนี้เพื่อหลีกเลี่ยงความไม่มั่นคง สำหรับการควบคุมอย่างง่ายที่ใช้งานจริง การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉาก จะขับหัวขับที่เกี่ยวข้องด้วยผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ของโครงสร้างทั้งเจ็ด ซึ่งค่าเหล่านี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร ความเร็วของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร การขจัดของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร
สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักที่เลือกจะต้องเป็นค่าเพิ่มสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดสอบทางพลศาสตร์ของอาคารและไม่ใช้การปรับเปลี่ยนที่อิงกับความถี่ สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz) และเป็นผลรวมเชิงเส้นของค่าพลศาสตร์ที่วัดได้ก่อนหน้านั้น ไม่ใช้การจัดการกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) เพื่อเป็นหลักฐานแสดงประสิทธิภาพของหัวขับในการควบคุมการลดแรงสั่นสะเทือน สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยการขจัดที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนอื่นๆ จะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย และค่าควบคุมจะถูกปรับตาม
การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉากทำให้สามารถระบุคำสั่งแรงที่หัวขับได้ ซึ่งเป็นผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ทั้งเจ็ดของโครงการ ซึ่งค่าทั้งเจ็ดนี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและอาคาร ความเร็วของมวลหน่วงปรับค่าและอาคาร การขจัดของมวลหน่วงปรับค่าและอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและอาคาร สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักจะต้องเป็นค่าสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดลองทางพลศาสตร์ของอาคาร สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz)
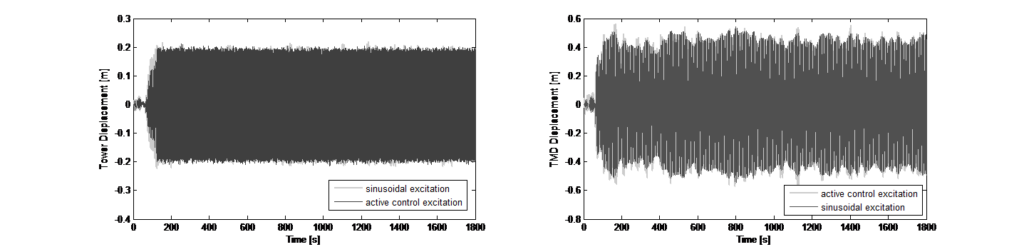
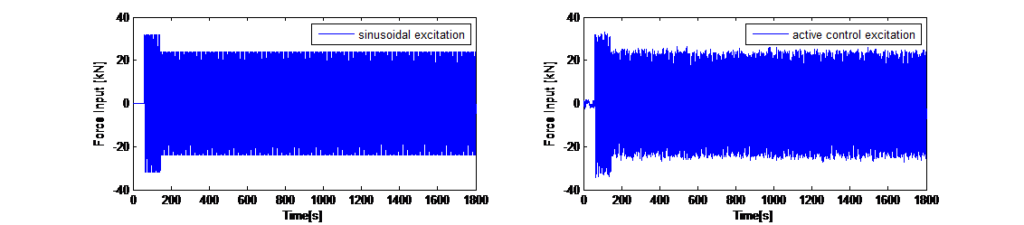
และแฟกเตอร์ถ่วงน้ำหนักเป็นค่าสเกลาร์ ซึ่งไม่ใช้ฟังก์ชันถ่ายโอนที่อิงกับความถี่ในทุกรูปแบบ และสัญญาณตอบกลับเป็นผลรวมเชิงเส้นของคุณสมบัติทางพลศาสตร์ ไม่ใช้การจัดการหรือตรรกะกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) ดังนั้นสามารถปรับอินพุตแรงที่กระทำต่อมวลถ่วงปรับค่าในฐานะแรงควบคุมหัวขับได้ในแต่ละขั้นของเวลา รูปที่ 12 แสดงผลของการจําลองระเบียบวิธีสำหรับการยับยั้งแรงสั่นสะเทือน – การขจัดของอาคาร และการเคลื่อนที่ของมวลถ่วงปรับค่าที่เกิดขึ้น
สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนจะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย
และต้องปรับค่าควบคุมตาม การระบุแฟกเตอร์ถ่วงน้ำหนักสำหรับค่าชดเชยนี้จะระบุโดยลองเปลี่ยนค่าไปเรื่อยๆ จนกว่าจะได้ค่าที่เหมาะสม รูปที่ 13 แสดงผลลัพธ์ที่เป็นตัวเลขที่มีการรบกวนของน้ำหนักกระทำจากแรงลมกรรโชกสำหรับการสั่นกระตุ้นโดยมีการกระตุ้นแบบสมการไซน์อย่างง่ายและขั้นตอนวิธีการควบคุมที่ใช้
8.0 แนวคิดด้านความปลอดภัย
เมื่อพิจารณาแรง +/- 40 กิโลนิวตันซึ่งสร้างจากหัวขับเชิงเส้นที่ใช้ แนวคิดด้านความปลอดภัยที่รับรองว่าการขจัดของอาคารจะไม่เกินค่าความล้าที่กำหนดไว้จึงเป็นสิ่งที่สำคัญอย่างยิ่ง ซึ่งต้องใช้แม้ว่าเอาต์พุตแรงที่เกิดขึ้นไม่มากพอที่จะทำให้ส่วนบนสุดของอาคารเกิดการเบี่ยงจากตำแหน่งเดิมมากกว่าค่าที่กำหนดไว้ คือ +/-200 มม. แนวทางหนึ่งที่จะช่วยเสริมความปลอดภัยให้กับระบบ คือ การเพิ่มจำนวนเซ็นเซอร์ตรวจวัดการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคาร ซึ่งทำได้โดยการใช้ระบบควบคุมแยกต่างหากอีกระบบหนึ่งที่ควรใช้หลักการวัดอีกแบบหนึ่งซึ่งแตกต่างไปจากอุปกรณ์ควบคุมที่มีอยู่ สำหรับโครงการที่นำเสนอนี้ อุปกรณ์ควบคุมที่ใช้ดังกล่าว ได้แก่ มาตรวัดความเร่ง และเกณฑ์ขั้นต่ำของความเร่งที่กำหนดสำหรับการกรองความถี่ของสัญญาณภายในช่วงความถี่ธรรมชาติที่เกี่ยวข้องของโครงสร้าง ระบบควบคุมที่เหนือกว่าที่ใช้แทนก็คือระบบนำทางด้วยดาวเทียม (Global Navigation Satellite System, GNSS) ที่มีความแม่นยำ +/- 10 มม.
ระบบนำทางด้วยดาวเทียมต้องมีสถานีฐานอ้างอิงสำหรับการประมวลผลข้อมูลพิกัดให้กลายเป็นค่าตอบกลับของการขจัดที่เกิดขึ้นจริง หากการขจัดของส่วนบนสุดของอาคารเกินกว่าเกณฑ์ที่กำหนดไว้ในระหว่างการสั่นกระตุ้นเทียม ซึ่งอาจมีสาเหตุมาจากแรงลมหรือการกระตุ้นอื่นๆ รีเลย์จะสลับสัญญาณไปเป็น 0 โวลต์ ซึ่งจะยกเลิกการสั่นกระตุ้น นอกจากนี้ ระบบควบคุมทั้งสองระบบยังตรวจสอบข้อมูลที่ได้มาอย่างต่อเนื่องเพื่อหาสัญญาณเซ็นเซอร์ที่ผิดพลาด ซึ่งจะทำให้เกิดการยกเลิกการสั่นกระตุ้นแบบแอคทีฟด้วยเช่นกัน สัญญาณความเร่ง/ขดลวดที่ผิดพลาดจะถูกตรวจจับโดยเกณฑ์ที่ดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงสเปกตรัม หากการดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงที่เกี่ยวข้องสามารถทำได้เท่านั้น จึงจะสามารถสรุปได้ว่าเซ็นเซอร์ส่งสัญญาณที่ถูกต้อง ในขณะที่ระบบนำทางด้วยดาวเทียมวิเคราะห์การเปลี่ยนแปลงของข้อมูลพิกัด แต่หากข้อมูลที่เก็บตัวอย่างไม่เปลี่ยนแปลงอย่างทันท่วงที ให้ถือว่าสัญญาณผิดพลาดได้เลย
9.0 การทดสอบแรงสั่นสะเทือน
การทดสอบแรงสั่นสะเทือนของอาคารครั้งแรกทำเมื่อตอนที่อาคารยังสร้างไม่เสร็จ ดังนั้นความถี่พื้นฐานของอาคารในสภาพนี้จึงสูงกว่าช่วงการปรับค่าของระบบมวลหน่วงปรับค่าแบบแพสซีฟที่กำหนด มวลหน่วงปรับค่าถูกปรับความถี่ในการปรับค่าให้สูงสุดเท่าที่จะเป็นไปได้ วัตถุประสงค์ของการทดสอบแรงสั่นสะเทือน คือ เพื่อระบุความถี่พื้นฐานของอาคารที่ปิดใช้งานระบบมวลหน่วงปรับค่า และการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้าง นอกจากนี้ ควรระบุพฤติกรรมเชิงพลศาสตร์ที่ใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ รวมถึงการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นเนื่องจากระบบมวลหน่วงปรับค่าแบบแพสซีฟด้วย การระบุความถี่ธรรมชาติพื้นฐานของอาคาร วิธีหาความหนาแน่นของสเปกตรัมพลังงานโดยใช้ค่าเฉลี่ยที่เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ (Averaged Normalized Power Spectral Density, ANPSD) [1] สามารถใช้ได้ เพื่อการนี้ ต้องแบ่งบันทึกเวลาออกเป็นส่วนๆ ซึ่งต้องเปลี่ยนส่วนเหล่านี้ให้เป็นโดเมนความถี่ ต้องเปลี่ยนค่าสเปกตรัมที่ได้ให้เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ จากนั้นนำไปหาค่าเฉลี่ยและคูณด้วยค่าสเปกตรัมเชิงซ้อนสังยุค
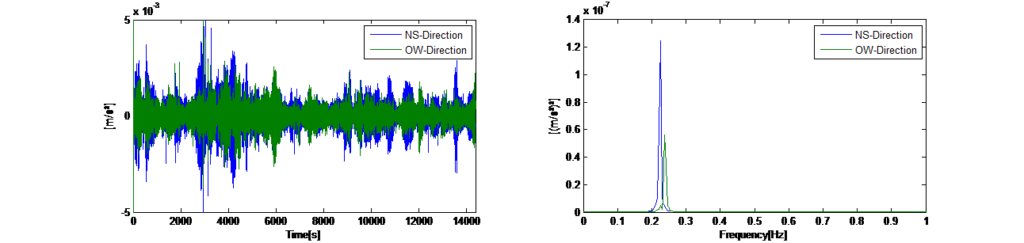
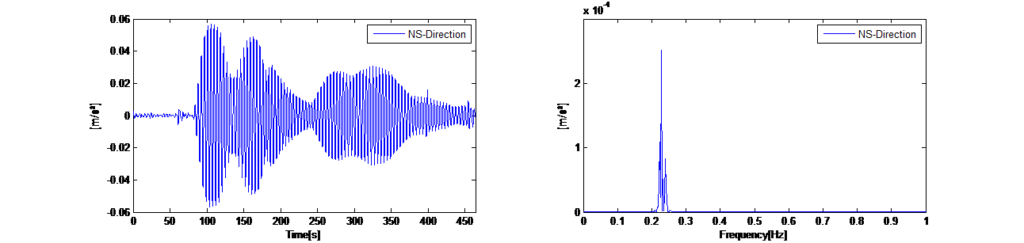
เมื่อทำเช่นนั้น แรงสั่นสะเทือนแบบสุ่มทั้งหมดจะถูกกำจัด และแรงสั่นสะเทือนอิสระของโครงสร้างที่เกิดซ้ำจะแสดงเป็นค่าสเปกตรัมเฉลี่ย ซึ่งจะเป็นความถี่ธรรมชาติของอาคารที่ถูกกระตุ้นเป็นหลัก รูปที่ 14 ซ้าย แสดงบันทึกเวลาของแรงสั่นสะเทือนแวดล้อมในแนวนอน ในทิศทาง x และ y โดยปิดใช้งานมวลหน่วงปรับค่า รูปที่ 14 ขวา แสดงค่าเฉลี่ยของสเปกตรัมพลังงานอัตโนมัติ (Auto Power Spectra) ที่ได้จากการแบ่งส่วนเวลาที่ยาว 120 วินาที สเปกตรัมเผยให้เห็นว่าอาคารแสดงถึงการตอบสนองทางพลศาสตร์ที่ความถี่หลักสองความถี่ (0.225 Hz ในทิศทาง x และ 0.245 Hz ในทิศทาง y)
นอกเหนือจากวิธีหาค่าสเปกตรัมพลังงานเฉลี่ย (Averaged Power Spectrum) ที่อธิบายไว้ข้างต้น ซึ่งถือว่าการกระตุ้นแวดล้อมก่อให้เกิดการตอบสนองทางพลศาสตร์ที่เพียงพอในโหมดแรงสั่นสะเทือนที่ศึกษา เพื่อเพิ่มความปลอดภัยแบบสุ่ม มีการระบุความถี่ธรรมชาติโดยใช้ซอฟต์แวร์ ARTEMIS ที่มีจำหน่ายทั่วไปเพื่อประมวลผลข้อมูลสัญญาณ [1] ซึ่งมีทั้งวิธีการแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition) และวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification)
การแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition, EFDD) และการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) เป็นเทคนิคที่ใช้กันอย่างแพร่หลายสำหรับการระบุตัวแปรในการสั่นที่ได้จากแรงเอาต์พุตที่ออกมาเท่านั้น
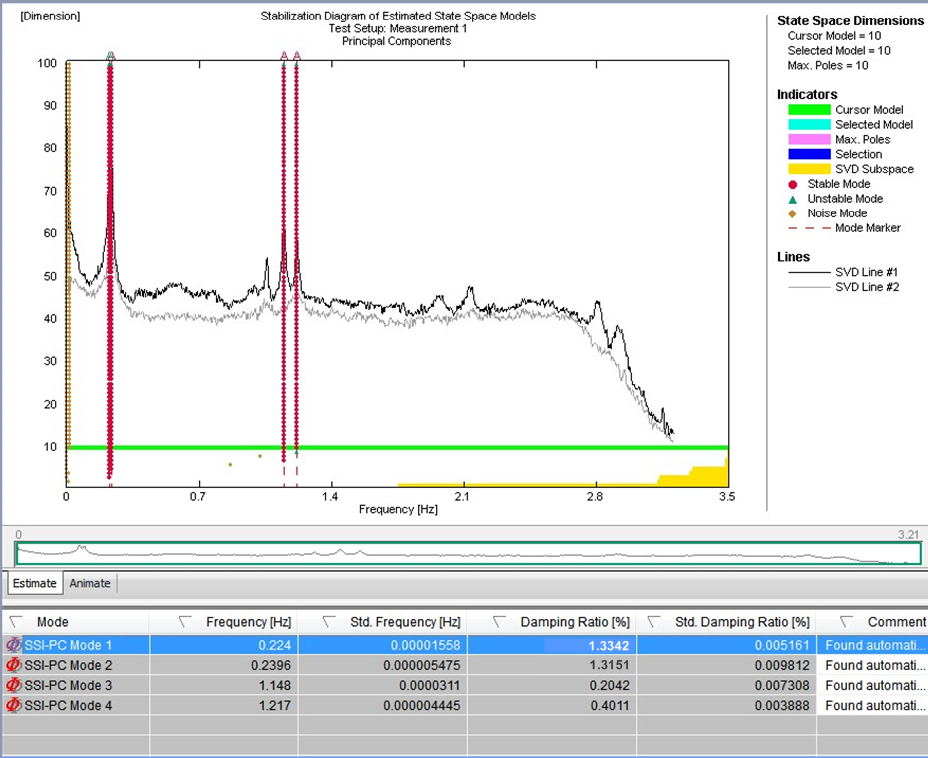
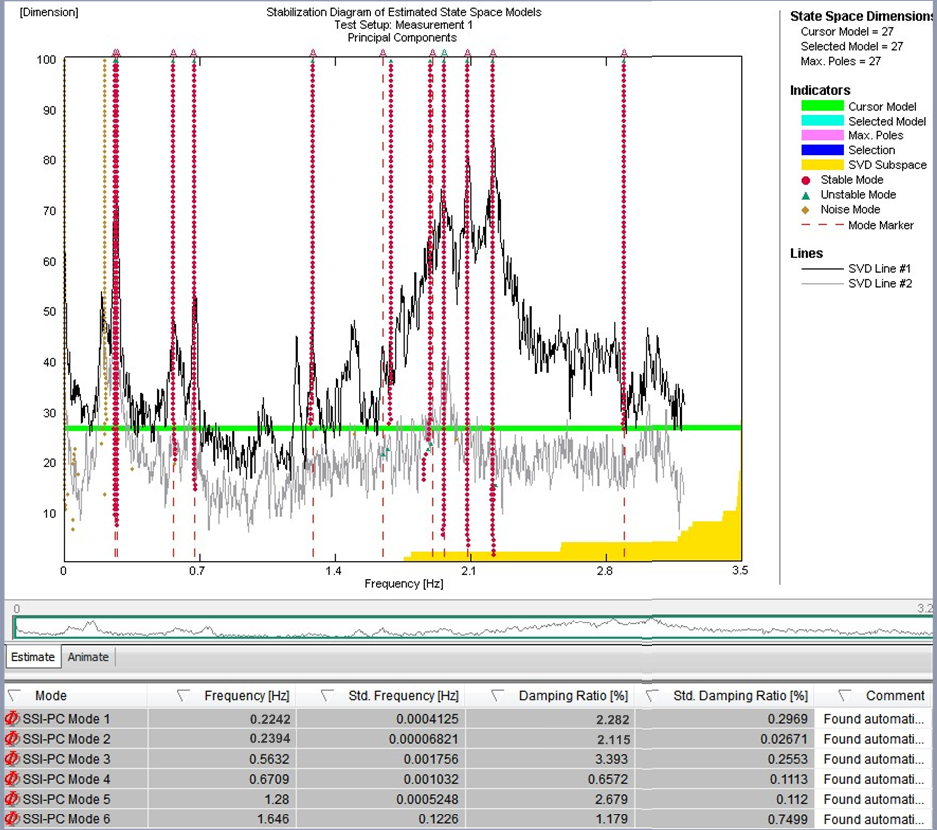
รูปที่ 15 – บัตรความมั่นคงของบันทึกแรงสั่นสะเทือนแวดล้อมที่ปิดใช้งานมวลหน่วงปรับค่า (ซ้าย) และที่เปิดใช้งานมวลหน่วงปรับค่า (ขวา)
วิธีการแตกกระจายโดเมนความถี่แบบพิเศษ (EFDD) ใช้การคำนวณสเปกตรัมการตอบสนอง ดังนั้น บันทึกที่ยาวต้องรักษาระดับข้อผิดพลาดของค่าสเปกตรัมโดยประมาณให้อยู่ในระดับต่ำและสกัดตัวแปรในการสั่นด้วยวิธีที่เชื่อถือได้ ขั้นตอนวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ใช้ในการระบุความเชื่อมโยงโดยใช้แบบจำลองของแรงเอาต์พุตที่ออกมาเท่านั้น วิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ทำงานโดยขึ้นอยู่กับเวลาและขึ้นอยู่กับคำอธิบายสถานะในขณะนั้น (state space) ของปัญหาทางพลศาสตร์ ผลการระบุระบบที่ลำดับแบบจำลองต่างๆ จะถูกนำมาเปรียบเทียบกันเพื่อแยกการสั่นของโครงสร้างที่แท้จริงออกจากการสั่นเทียมในสิ่งที่เรียกว่าแผนภาพความเสถียร แผนภาพเหล่านี้เป็นวิธีที่นิยมใช้ในการเลือกแบบจำลองระบบที่ระบุ เพราะการสั่นของโครงสร้างที่แท้จริงมักจะเสถียรในลำดับแบบจำลองที่ต่อเนื่อง โดยจะมีขั้นตอนอัตโนมัติเพื่อประเมินความสอดคล้องกับเกณฑ์ความเสถียรที่กำหนดไว้ รูปที่ 15 แสดงบัตรความเสถียรของข้อมูลแวดล้อมที่บันทึกไว้ ซึ่งจะสามารถระบุการสั่นที่เกี่ยวข้องได้จากข้อมูลนี้ การสั่นที่ระบุและอัตราการหน่วงแรงสั่นสะเทือนที่ระบุสำหรับการสั่นแต่ละแบบในสถานะที่ปิดใช้งานมวลหน่วงปรับค่า (ซ้าย) และเปิดใช้งานมวลหน่วงปรับค่า (ขวา) แสดงในรูปที่ 14 เช่นกัน ซึ่งจะเห็นการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นด้วย การหน่วงแรงสั่นสะเทือนเพิ่มเติมของโครงสร้างอยู่ในช่วงค่าทางทฤษฎีที่สามารถระบุได้จากแบบจำลองทางทฤษฎีที่ใช้ในการปรับค่าของมวลหน่วงปรับค่าอีกครั้ง
นอกจากการทดสอบแรงสั่นสะเทือนแวดล้อมด้วยระบบมวลหน่วงปรับค่าแบบแพสซีฟแล้ว ยังมีการทดสอบเบื้องต้นด้วยการสั่นกระตุ้นแบบแอคทีฟด้วย โดยไม่คำนึงถึงสถานะที่ปรับใหม่ของระบบมวลหน่วงปรับค่า รูปที่ 12 ซ้าย แสดงบันทึกเวลาของความเร่งที่บันทึกไว้ที่ส่วนบนสุดของอาคาร หลังจากการกระตุ้นแบบสมการไซน์ครั้งแรก มีการใช้ขั้นตอนวิธีสำหรับระดับความเร่งคงที่เพื่อทดลองระบุค่าสหสัมพันธ์ระหว่างการเบี่ยงจากตำแหน่งเดิมของอาคารและการขจัดของมวลหน่วงปรับค่าที่เกิดจากแรง บันทึกเวลาที่แสดงในรูปที่ 12 แสดงเหตุการณ์ทดสอบของการสั่นกระตุ้น 2 เหตุการณ์ และสเปกตรัม FFT ที่เกี่ยวข้องแสดงการตอบสนองที่ชัดเจนของอาคารในความถี่พื้นฐานทั้งสองของอาคาร (ทิศทาง x และ y) ส่วนของเวลาที่เป็นสีเขียวคือการกระตุ้นแบบสมการไซน์ของมวลโดยปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้เกิดการตอบสนองเชิงพลศาสตร์ในทิศทางหลักทั้งสอง สเปกตรัม FFT ที่เกิดขึ้นแสดงจุดสูงสุดสองจุดเพื่อระบุความถี่พื้นฐานในทั้งสองทิศทาง ส่วนของเวลาที่เป็นสีน้ำเงินคือการกระตุ้นที่เปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้การขจัดของอาคารเคลื่อนที่ไปในทิศทางหลักทิศทางเดียวได้คงที่ยิ่งขึ้น การลดลงของแรงสั่นสะเทือนที่เกิดขึ้นหลังจากปิดการสั่นกระตุ้นถูกนำไปใช้เพื่อระบุการหน่วงแรงสั่นสะเทือนของโครงสร้างโดยได้ค่า D=2.4% ผลลัพธ์นี้สัมพันธ์กับอัตราการหน่วงแรงสั่นสะเทือนที่ระบุโดยใช้ขั้นตอนวิธี SSI
10.0 สรุปและการดำเนินงานในอนาคต
มีการติดตั้งมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ไว้ในหอทดสอบ Thyssen Krupp สูง 246 ม. โดยมีวัตถุประสงค์เพื่อเจตนากระตุ้นให้อาคารหอทดสอบนี้สั่นจนเกิดการตอบสนองทางพลศาสตร์แบบมีการควบคุมถึงความถี่พื้นฐานของตัวอาคาร วัตถุประสงค์ของการกระตุ้นนี้คือเพื่อหาค่าการแกว่งของอาคารในสองทิศทางหลัก จากการคำนวณทางคณิตศาสตร์พบว่าต้องใช้มวลหน่วงปรับค่าขนาด 240 ตันเพื่อให้ได้การหน่วงแรงสั่นสะเทือนเพิ่มเติมที่เพียงพอสำหรับการสั่นแบบแพสซีฟ และเพื่อสร้างแรงควบคุมที่เพียงพอที่จะทำให้การขจัดที่ส่วนบนสุดของอาคารอยู่ในช่วง +/- 200 มม. มีการพัฒนาและทดสอบขั้นตอนวิธีการควบคุมด้วยการจําลองระเบียบวิธีเชิงตัวเลขเพื่อสร้างระดับการขจัดที่คงที่สำหรับการสั่นกระตุ้นและเพื่อยับยั้งการขจัดที่เกิดจากแรงลมและส่วนประกอบของแรงสั่นสะเทือนที่ถูกทำให้สั่นในทิศทางตั้งฉาก หลังจากการติดตั้งระบบมวลหน่วงปรับค่าแบบลูกตุ้มแพสซีฟที่ใช้แผ่นคอนกรีตสำเร็จรูปเป็นมวลต้าน (reaction mass) มีการเปิดใช้งานหัวขับและทำการทดสอบเป็นครั้งแรก การทดสอบแสดงให้เห็นว่าการหน่วงแรงสั่นสะเทือนตามธรรมชาติของอาคารสูงกว่าที่คาดไว้ แต่สามารถระบุการสั่นที่เกี่ยวข้องทั้งหมดได้อย่างชัดเจน การสั่นกระตุ้นแบบแอคทีฟของอาคารทำงานได้ผลและสามารถทำการทดสอบได้ แม้ว่าจะไม่ถึงขั้นที่จะค้นพบตัวแปรในการทำงานจริงทั้งหมดก็ตาม ทั้งนี้เป็นเพราะอาคารยังสร้างไม่เสร็จสมบูรณ์ และด้วยเหตุนี้ จึงยังไม่สามารถปรับแต่งมวลหน่วงปรับค่าแบบแพสซีฟให้เข้ากับความถี่พื้นฐานที่กำหนดได้
ทันทีที่ปรับแต่งระบบมวลหน่วงปรับค่าได้แล้ว จะมีการทดสอบอาคารเพิ่มเติม ซึ่งจะรวมถึงการทดสอบเกี่ยวกับการหน่วงแรงสั่นสะเทือนที่ขึ้นอยู่กับแอมพลิจูดและการบูรณาการแนวคิดด้านความปลอดภัยด้วย
เอกสารอ้างอิง
[1] Wenzel, H.; Pichler, D.; Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M.; Andersen, P.; Mevel, L. (2012). “การวิเคราะห์ปฏิบัติการโมดอลโดยใช้วิธีการระบุสโตแคสติกแบบเร็ว”, การดำเนินการประชุมของสมาคมเพื่อการทดลองกลศาสตร์
[3] Soong, T.T.; Spencer, J.R. (2000). “การควบคุมโครงสร้างแบบ Active, Semi-Active และ Hybrid” ในการประชุมระดับโลกครั้งที่ 12 สำหรับวิศวกรรมแผ่นดินไหว
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). การควบคุมมวลหน่วงปรับค่าแบบพาสซีฟและแอคทีฟของการตอบสนองของอาคารสูงต่อลมกระโชกแรง. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A.; Kazuto, S. (2008). “Active Control of Structures”, Wiley, Padstow
แชร์โพสต์นี้






แหล่งข้อมูลเพิ่มเติม
หากคุณต้องการข้อมูลเพิ่มเติมเกี่ยวกับหัวข้อนี้
กรุณาติดต่อสอบถามเราได้เสมอ
วิศวกรโครงการของเราจะตอบกลับคุณโดยเร็วที่สุด
กรณีศึกษาเกี่ยวกับเทคโนโลยีการหน่วงแรงสั่นสะเทือนสำหรับอาคารสูง: ความสบายและความปลอดภัย
แนวทางสำหรับระบบหน่วงการสั่นสะเทือนของสมาคมอาคารสูงและการอยู่อาศัยในเขตเมือง (Council on Tall Buildings and Urban Habitat, CTBUH)
หอทดสอบ Thyssen Krupp เมือง Rottweil ประเทศเยอรมนี
รายละเอียดโครงการ
- ปีที่สร้างเสร็จ:
2016 (โครงสร้างชั้นสูงสุด) - ผู้พัฒนา/ผู้รับเหมา/เจ้าของ:
Krupp Hoesch Stahl GmbH / Thyssen Krupp Elevators - สถาปนิก:
Werner Sobek ร่วมกับ JAHN Architects สาขาสตุทการ์ทและชิคาโก - วิศวกรโยธา:
Werner Sobek จากสตุทการ์ท - ผู้จัดจำหน่ายอุปกรณ์หน่วงการสั่นสะเทือน:
GERB Vibration Control Systems - ห้องปฏิบัติการที่ทำการทดสอบ:
Wacker Ingenieure (วิศวกรรมลม / การทดสอบในอุโมงค์ลม) - ความสูง / ความสูงระหว่างชั้น:
246 ม. / 3.3 ม. (พื้นที่สำนักงาน) - จำนวนชั้น:
27 ชั้น / พื้นที่สำนักงาน 8 ชั้น - พื้นที่ทั้งหมดของอาคาร:
340 ตารางเมตร - หน้าที่ใช้สอยของอาคาร:
หอทดสอบลิฟต์ / สำนักงาน / ดาดฟ้าสำหรับสังเกตการณ์ (232 ม.) - กลยุทธ์การหน่วงแรงสั่นสะเทือนที่ใช้:
ระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (240 ตัน)
- วัสดุโครงสร้าง:
คอนกรีดเสริมเหล็ก (C50/60) / เปลือกอาคารด้วยแผ่นผนังพอลิเตตระฟลูออโรเอทิลีน (PTFE) บนโครงสร้างเหล็ก - ระบบโครงสร้าง:
แกนรับน้ำหนักคอนกรีตเสริมเหล็กที่ยื่นออกมาจากฐานรากแพ
(- 32 ม.)
กรณีศึกษาเกี่ยวกับเทคโนโลยีการหน่วงแรงสั่นสะเทือนสำหรับอาคารสูง: ความสบายและความปลอดภัย
แนวทางสำหรับระบบหน่วงการสั่นสะเทือนของสมาคมอาคารสูงและการอยู่อาศัยในเขตเมือง (Council on Tall Buildings and Urban Habitat, CTBUH)
หอทดสอบ Thyssen Krupp เมือง Rottweil ประเทศเยอรมนี
รายละเอียดโครงการ
- ปีที่สร้างเสร็จ: 2016 (โครงสร้างชั้นสูงสุด)
- ผู้พัฒนา/ผู้รับเหมา/เจ้าของ: Krupp Hoesch Stahl GmbH / Thyssen Krupp Elevators
- สถาปนิก: Werner Sobek ร่วมกับ JAHN Architects สาขาสตุทการ์ทและชิคาโก
- วิศวกรโยธา: Werner Sobek จากสตุทการ์ท
- ผู้จัดจำหน่ายอุปกรณ์หน่วงการสั่นสะเทือน: GERB Vibration Control Systems
- ห้องปฏิบัติการที่ทำการทดสอบ: Wacker Ingenieure (วิศวกรรมลม / การทดสอบในอุโมงค์ลม)
- ความสูง / ความสูงระหว่างชั้น: 246 ม. / 3.3 ม. (พื้นที่สำนักงาน)
- จำนวนชั้น: 27 ชั้น / พื้นที่สำนักงาน 8 ชั้น
- พื้นที่ทั้งหมดของอาคาร: 340 ตารางเมตร
- หน้าที่ใช้สอยของอาคาร: หอทดสอบลิฟต์ / สำนักงาน / ดาดฟ้าสำหรับสังเกตการณ์ (232 ม.)
- วัสดุโครงสร้าง: คอนกรีดอัดแรง (C50/60) / แผ่นผนังพอลิเตตระฟลูออโรเอทิลีน (PTFE) บนโครงสร้างเหล็ก
- ระบบโครงสร้าง: แกนรับน้ำหนักคอนกรีตอัดแรงที่ยื่นออกมาจากฐานรากแพ (- 32 ม.)
- กลยุทธ์การหน่วงแรงสั่นสะเทือนที่ใช้: ระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (240 ตัน)
1.0 บทนำ/ประวัติความเป็นมา
หอสูง 246 ม. นี้ตั้งอยู่ในภาคตะวันตกเฉียงใต้ของประเทศเยอรมนี โดยสร้างขึ้นเพื่อเป็นอาคารสำหรับทดสอบนวัตกรรมของลิฟต์ หอนี้มีผังอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 20 ม. และมีพื้นที่ปล่องลิฟต์สำหรับทดสอบลิฟต์ได้ 9 ตัว ลิฟต์สำหรับใช้ในกรณีเพลิงไหม้หนึ่งตัว และลิฟต์แก้วที่เห็นทิวทัศน์ได้ในมุมกว้างอีกหนึ่งตัว นอกจากนี้ยังมีปล่องสูง 220 ม. อีกหนึ่งปล่องที่สามารถใช้เป็นปล่องลิฟต์เชิงกลเพื่อรับรองโปรแกรมทดสอบด้วย
ฐานอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 40 ม. ซึ่งเป็นพื้นที่เพิ่มเติมสำหรับงานระบบอาคาร โถงต้อนรับ และศูนย์ศึกษา ที่ความสูง 232 ม. มีดาดฟ้าสำหรับสังเกตการณ์ที่สูงที่สุดในประเทศเยอรมนี สามารถมองเห็นทิวทัศน์ที่งดงามของป่าดำและเห็นไปถึงเทือกเขาแอลป์ในวันที่อากาศแจ่มใส
2.0 ระบบโครงสร้าง
ระบบโครงสร้างของหอทดสอบเป็นท่อคอนกรีตอัดแรงที่มีเส้นผ่าศูนย์กลาง 20.8 ม. ปักยึดแน่นเข้าไปในดินลึก 30 ม. (ดูรูปที่ 2) ผนังท่อนี้มีความหนา 40 ซม. จากฐานถึงความสูงที่ระดับ 110 ม. และจากระดับความสูงดังกล่าวเป็นต้นไปผนังท่อจะหนา 25 ซม. ดินในบริเวณนั้นเป็นชั้นหินแข็งที่เรียกว่า Keuper และมีชั้นหินปูนที่เกิดจากการทับถมของเปลือกหอยในยุคดึกดำบรรพ์อยู่ด้านใต้ ทำให้สามารถรับน้ำหนักได้สูง จึงไม่จำเป็นต้องมีการตอกเสาเข็มก่อนวางฐานราก นอกจากดินในบริเวณโดยรอบจะยึดให้หอตั้งอยู่อย่างมั่นคงแล้ว โครงสร้างฐานที่กว้างของหอก็ช่วยเสริมความแข็งแกร่งด้านข้างให้กับหอด้วย
การเสริมความแข็งแกร่งภายในของท่อคอนกรีตส่วนใหญ่เกิดจากผนังด้านในของปล่องลิฟต์ มีการติดตั้งแผ่นฝ้าเพดานสำเร็จรูปไว้ที่บางระดับความสูงเพื่อให้สามารถเข้าถึงปล่องลิฟต์ได้ ปล่องลิฟต์บางปล่องสิ้นสุดที่ระดับความสูง 115 ม. และปิดด้วยแผ่นพื้นช่วงพาดยาวหนา 40 ซม. ซึ่งเป็นพื้นแบบหล่อในที่ ชั้นอาคารเหล่านี้ใช้เป็นพื้นที่สำนักงาน ถัดขึ้นไปด้านบนเป็นพื้นที่ว่างเปล่าจนถึงที่ระดับความสูง 197 ม. ซึ่งใช้เป็นพื้นที่กักเก็บความร้อนและพื้นที่สำหรับระบบมวลหน่วงปรับค่า (TMD) ส่วนบนสุดของหอใช้เป็นพื้นที่สำนักงานและพื้นที่สำหรับปล่องลิฟต์ที่เหลือ
องค์ประกอบที่โดดเด่นของหอทดสอบนี้คือผนังด้านนอกของอาคารที่ทำจากแผ่นตาข่ายใยแก้วเคลือบด้วยพอลิเตตระฟลูออโรเอทิลีน (PTFE) ช่องตาข่ายกว้างขึ้นตามความสูงที่เพิ่มขึ้นของอาคาร โดยยิ่งสูงก็จะยิ่งโปร่งมากขึ้น ซึ่งช่วยลดความหนาแน่นและน้ำหนักของวัสดุและลดแรงต้านอากาศ
รูปทรงที่เป็นเกลียวของผนังด้านนอกของอาคารทำหน้าที่เป็นเกลียวลดการสั่นสะเทือนหรือเกลียว Scruton และตัวแผ่นผนังเองช่วยให้ร่มเงาแก่โครงสร้างคอนกรีตเพื่อหลีกเลี่ยงความเค้นที่เกิดจากความร้อนของแสงอาทิตย์ การออกแบบและการเลือกใช้วัสดุของผนังด้านนอกของอาคารคำนึงถึงการติดตั้ง การบำรุงรักษา ความคงทน และการรับแรงลม
3.0 ขั้นตอนการก่อสร้าง
การก่อสร้างหอทดสอบมีขั้นตอนดังต่อไปนี้:
- การขุดหลุมกลมลึก 30 ม. เพื่อวางฐานรากของอาคาร การขุดหลุมกลมนี้ทำได้โดยการวางระเบิด หลังจากขุดหลุมแล้ว มีการยึดไม่ให้ดินถล่มลงมาด้วยการฝังสมอยึดดินและการพ่นคอนกรีต
- การเทฐานรากแพ
- การก่อสร้างโครงสร้างคอนกรีตในแนวตั้งใช้การหล่อคอนกรีตแบบเลื่อน โดยมีการสร้างผนังทั้งหมดอย่างต่อเนื่องเป็นเวลา 4 เดือน
- การก่อสร้างแผ่นพื้น
- การก่อสร้างบริเวณทางเข้า
4.0 การตอบสนองทางพลศาสตร์ต่อแรงลมที่คาดไว้
ความถี่พื้นฐานของหอทดสอบคาดว่าจะอยู่ในช่วง 0.17 Hz – 0.20 Hz ต่อวินาที โดยขึ้นอยู่กับขั้นตอนการก่อสร้างและสถานะของคอนกรีต (แตกร้าว/ไม่แตกร้าว) – ดูรูปที่ 4
การวิเคราะห์ลมพบว่าจะเกิดการสั่นของโครงสร้างที่ความเร็วลมที่ตรงกับค่าความเร็วลมที่ระดับพื้นดิน (ความสูง 10 ม.) ซึ่งก็คือในช่วง 55 – 60 กม./ชม. หากไม่มีการหน่วงแรงสั่นสะเทือนเพิ่มเติม คาดว่าการสั่นของโครงสร้างนี้จะทำให้ส่วนบนของอาคารเบี่ยงจากตำแหน่งเดิมไปประมาณ +/- 750 มม. ซึ่งนอกจากจะทำให้ผู้คนในอาคารรู้สึกไม่สบายแล้ว ยังทำให้โครงสร้างคอนกรีตของอาคารเกิดความล้าเป็นอย่างมากด้วย ซึ่งจะลดอายุการใช้งานของโครงสร้าง (ดูรูปที่ 5) เพื่อลดการตอบสนองทางพลศาสตร์ที่มีต่อการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้าง จึงมีการใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ เนื่องจากอาคารนี้จะใช้เป็นหอทดสอบความไวของอุปกรณ์ลิฟต์ที่มีต่อการแกว่งของอาคาร เจ้าของโครงการจึงมองหาความเป็นไปได้ที่จะกระตุ้นอาคารให้แกว่งเทียมในวันที่ลมสงบ ซึ่งทำให้เกิดการขจัดที่ไม่ก่อให้เกิดปัญหาเรื่องความล้า ระดับการแกว่งเทียมตามคำขอของเจ้าของโครงการและถือว่าปลอดภัยคือประมาณ +/- 200 มม. คำขอของเจ้าของโครงการนี้เป็นโอกาสที่หาได้ยากในการใช้ตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (Hybrid Mass Damper, HMD) หรือที่เรียกว่า มวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) เนื่องจากระบบการออกแบบแตกต่างไปจากระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริดอื่นๆ ที่เคยใช้ในอดีต ในบทถัดไปจะมีการนำเสนอข้อมูลเกี่ยวกับระบบนี้ รวมถึงการปรับแต่งระบบแพสซีฟ การออกแบบกลไกหัวขับ ขั้นตอนวิธีการควบคุม และแนวคิดด้านความปลอดภัย
5.0 การปรับแต่งระบบมวลหน่วงปรับค่าแบบแพสซีฟ
ต้องระบุตัวแปรของระบบมวลหน่วงปรับค่าแบบแพสซีฟโดยคำนึงถึงสามประเด็น ได้แก่ ก) เพื่อให้การหน่วงแรงสั่นสะเทือนเพิ่มเติมแก่โครงสร้างอย่างเพียงพอ เพื่อลดการตอบสนองทางพลศาสตร์ที่เกิดจากการสั่นเมื่อมีกระแสลมไหลวน ข) เพื่อจำกัดการเคลื่อนที่ของมวลหลักของมวลหน่วงปรับค่าในการสั่นแพสซีฟที่เกิดขึ้นให้อยู่ในค่าที่เป็นไปได้และสมเหตุสมผล สำหรับเวลาที่เกิดการสั่นเนื่องจากแรงลมกรรโชกที่มาปะทะด้านข้าง และ ค) เพื่อเลือกมวลหน่วงปรับค่าให้สอดคล้องอินพุตของพลังงานที่จะทำให้เกิดการเบี่ยงสูงสุดจากตำแหน่งเดิมของอาคารในการสั่นกระตุ้น โดยพิจารณาประสิทธิภาพในการต้านแรงลมที่เกิดขึ้นจากหัวขับที่มี (หรือ แรงสูงสุดที่เกิดขึ้นและช่วงแรงชักสูงสุดในระหว่างการปฏิบัติงาน) มีการใช้แบบจำลองทางคณิตศาสตร์เพื่อปรับแต่งระบบมวลหน่วงปรับค่า ซึ่งแสดงถึงการกระจายมวลน้ำหนักของอาคารและโมเมนต์ความเฉื่อยของมวลตามที่รายงานไว้ในคุณสมบัติทางโครงสร้างที่กำหนด องค์ประกอบเพื่อความแข็งแกร่งระหว่างพื้นอาคารได้รับการออกแบบมาให้สอดคล้องกับรูปแบบการสั่นและความถี่ธรรมชาติที่ได้จากการสังเกตการณ์อย่างเต็มรูปแบบ รูปที่ 6 ซ้าย แสดงรูปแบบการสั่นและความถี่ธรรมชาติของแบบจำลองเปรียบเทียบที่ใช้ นอกจากนี้ รูปที่ 6 ซ้าย ยังแสดงรูปแบบการสั่นของแบบจำลองเปรียบเทียบโดยเทียบกับต้นแบบอย่างละเอียดของที่จัดทำโดยปรึกษาด้านโครงสร้างด้วย
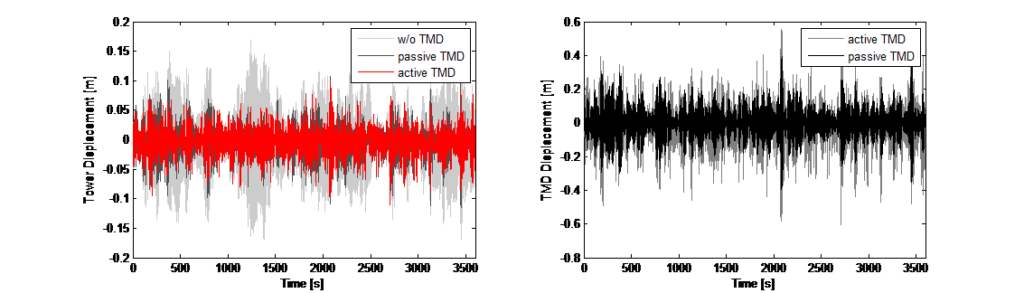
นอกจากนี้ ยังมีการสร้างแบบจำลองมวลหน่วงปรับค่าแยกต่างหากให้เป็นระบบลูกตุ้มที่สามารถจับตำแหน่งเยื้องศูนย์กลางของตัวมวลเองในหออาคารได้ด้วย คุณลักษณะของน้ำหนักกระทำสำหรับควบคุมแรงป้อนที่มากระทำหรือการสั่นของโครงสร้างเนื่องจากกระแสลมไหลวนก็เหมือนกับการกระตุ้นให้เกิดการสั่นด้วยการเคลื่อนที่แบบฮาร์มอนิกอย่างง่าย อย่างไรก็ตาม แรงลมกรรโชกที่มีอยู่เป็นลักษณะตามธรรมชาติที่เกิดขึ้นแบบสุ่ม ดังนั้นจึงต้องใช้เกณฑ์ในการปรับแต่งอื่นที่นอกเหนือจากเกณฑ์ Den Hartog อันเป็นที่รู้จักกันดี นอกจากนี้ การเคลื่อนที่สัมพัทธ์ของมวลหน่วงปรับค่าของแรงลมแบบสุ่มยังมากกว่าแบบฮาร์มอนิกด้วย การกำหนดค่าตัวเลขของตัวแปรที่เหมาะสมของมวลหน่วงปรับค่าควรพิจารณาแรงลมที่ใกล้เคียงกับความเป็นจริงมากที่สุด บันทึกเวลาที่สร้างขึ้นมีทั้งแรงลมกรรโชกแบบสุ่ม (ตามสเปกตรัม Davenport) และการสั่นที่มีความถี่ตรงกัน กระแสลมไหลวน ส่วนประกอบที่แสดงถึงการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้างโดยรวม (ดูรูปที่ 3 ขวา) การลดการเบี่ยงจากตำแหน่งเดิมของอาคารเกิดจากระบบมวลหน่วงปรับค่าแบบแพสซีฟที่ปรับแต่งแล้ว และการขจัดของมวลหน่วงปรับค่าที่เกิดขึ้นแสดงอยู่ในรูปที่ 3 ขวา
จากผลการทดสอบเหล่านี้ที่มีค่าการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้างโดยประมาณ ξ=0.8 % สามารถระบุได้ว่าต้องใช้มวลหน่วงปรับค่าหนัก 240 ตันเพื่อให้ได้การขจัดในขอบเขต +/- 650 มม. โดยที่ยังคงรักษาอัตราการหน่วงของมวลหน่วงปรับค่าไว้ได้ในระดับที่เหมาะสม เพื่อให้มวลหน่วงปรับค่ามีประสิทธิภาพสูงสุด การหน่วงที่เพิ่มขึ้นของมวลหน่วงปรับค่าจะช่วยลดระยะการเคลื่อนที่พร้อมทั้งยังคงมีสมรรถนะที่เพียงพอ แต่อาจส่งผลเสียต่อแรงที่เกิดจากหัวขับ เพื่อระบุแรงที่ต้องใช้ให้การปรับตั้งมวลหน่วงปรับค่าขนาด 240 ตันให้เหมาะสม จึงมีการใช้แบบจำลองเปรียบเทียบเพื่อตรวจสอบว่า ด้วยแรงสูงสุด 40 กิโลนิวตันจากหัวขับ อาคารจะเบี่ยงจากตำแหน่งเดิมในช่วง +/- 200 มม. ได้หรือไม่ รูปที่ 4 แสดงผลของการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลาบนแบบจำลองเปรียบเทียบทางคณิตศาสตร์ ซึ่งในที่นี่แสดงการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคารที่เกิดขึ้น การเบี่ยงจากตำแหน่งเดิมของมวลหน่วงปรับค่า และแรงอินพุตกระทำอย่างต่อเนื่องที่เป็นสาเหตุของการเบี่ยงจากตำแหน่งเดิมดังกล่าว
6.0 คำอธิบายระบบควบคุม
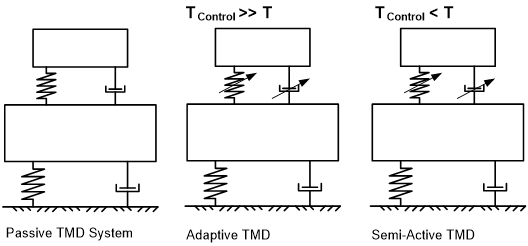
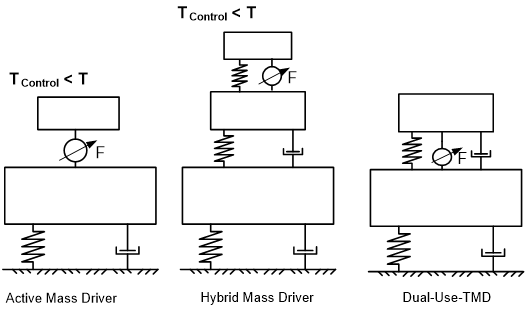
การทำงานเป็นคู่ของระบบควบคุมตอบโจทย์ ก) วัตถุประสงค์ในลดการใช้พลังงานในขณะทำงานแบบแพสซีฟตามปกติเพื่อลดแรงสั่นสะเทือนที่เกิดขึ้น ข) วัตถุประสงค์ในการลดแรงที่หัวขับต้องใช้ด้วยการใช้ปรากฏการณ์เรโซแนนซ์เพื่อกระตุ้นมวลหน่วงปรับค่าหลักให้ได้แรงจริงสูงสุดตามที่ต้องการ ดังนั้นเมื่อเทียบกับระบบควบคุมอื่นๆ (ดูรูปที่ 1) หัวขับจะเชื่อมต่อโครงสร้างหลักและมวลหน่วงปรับค่าเข้าด้วยกัน แต่ไม่ใช้เพื่อควบคุมมวลหน่วงปรับค่าโดยตรง มิฉะนั้นจะกลายเป็นระบบตัวขับมวลแบบแอคทีฟ (Active Mass Driver) หรือตัวหน่วงทั่วไป
สำหรับมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ที่ใช้ อาคารนี้เลือกใช้มวลตอบสนองสำหรับการทำงานแบบแพสซีฟที่มีน้ำหนัก 240 ตัน สำหรับการสั่นกระตุ้นมีหัวขับเชิงเส้นสองหัว หนึ่งหัวต่อหนึ่งทิศทางหลัก ซึ่งยึดติดอยู่กับมวลหน่วงปรับค่าด้วยข้อต่อหมุนใกล้กับจุดศูนย์ถ่วงของมวลเพื่อหลีกเลี่ยงแรงบิดที่ไม่พึงประสงค์ หัวขับเชิงเส้นแต่ละตัวสามารถสร้างแรงได้ถึง 40 กิโลนิวตันได้ภายในช่วงชักสูงสุด +/- 600 มม. เพียงช่วงเดียว (ดูรายละเอียดในรูปที่ 2) หัวขับเชิงเส้นสามารถถอดออกได้ ดังนั้นการสั่นแบบแพสซีฟทั้งหมดจะไม่ได้รับผลกระทบจากตลับลูกปืนของหัวขับในกรณีที่ตลับลูกปืนเกิดความขัดข้อง ซึ่งเป็นกรณีที่เกิดขึ้นได้ยาก
รูปที่ 10 – ประเภทของระบบควบคุม – มวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) เทียบกับระบบแพสซีฟ กึ่งแอคทีฟ แอคทีฟและไฮบริด
ระบบประกอบด้วยมาตรวัดความเร่งแกนเดียวสี่ตัว (คานรูปตัว K สำหรับรับแรงแผ่นดินไหว/MEMS หนึ่งคานต่อหนึ่งทิศทาง) เพื่อระบุระดับสูงสุดของอาคารและความเร่งของมวลหน่วงปรับค่า สัญญาณความเร่งจะถูกกรองความถี่ภายในช่วงความถี่ธรรมชาติพื้นฐานของอาคาร (0.1 – 0.3 Hz) และหาค่าปริพันธ์เพื่อให้ความเร็วและการเบี่ยงจากตำแหน่งเดิมแก่อาคาร
นอกจากนี้ ค่าการขจัดที่หาค่าปริพันธ์แล้วสามารถนำไปเปรียบเทียบกับค่าที่วัดได้จากระบบนำทางด้วยดาวเทียมที่ติดตั้งเสริมไว้ที่ด้านบนสุดได้ด้วย เพื่อเปรียบเทียบค่าคลาดเคลื่อนของสัญญาณ จากนั้นจะทำการทดสอบสหสัมพันธ์ตามข้อมูลที่ได้ นอกจากนี้ มีการควบคุมการขจัดของมวลหน่วงปรับค่าโดยตรงด้วยอุปกรณ์แปลงพลังงานหรือทรานสดิวเซอร์แบบขดลวดและระบบวัดความยาวแบบเหนี่ยวนำที่อยู่ในมอเตอร์เชิงเส้น
7.0 ขั้นตอนวิธีการควบคุม
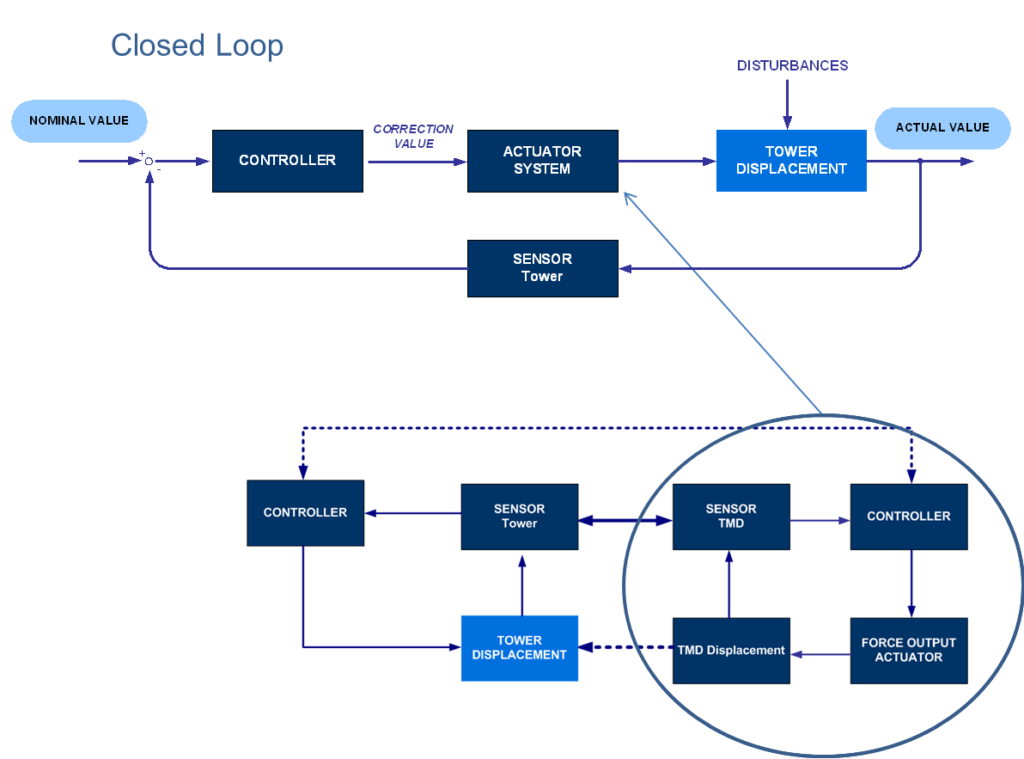
วงจรการควบคุมทั่วไปของอาคารแสดงไว้ในรูปที่ 5 ซึ่งแสดงลำดับการควบคุมแบบวงจรปิด การออกแบบอย่างละเอียดของขั้นตอนวิธีการควบคุมจะต้องมีแบบจำลองเชิงวิเคราะห์ของปฏิสัมพันธ์ระหว่างหัวขับกับมวลหน่วงปรับค่า เพื่อระบุความสัมพันธ์ระหว่างอินพุตแรงจากหัวขับและแรงกระทำที่ใช้ ซึ่งต้องใช้ร่วมกับแบบจำลองเชิงวิเคราะห์ของโครงสร้างหลักที่อธิบายพฤติกรรมเชิงพลศาสตร์โดยรวมของอาคาร นอกจากนี้ เมื่อเปรียบเทียบกับขั้นตอนวิธีการควบคุมมาตรฐานที่ใช้กับตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (HMD) เช่น ใน [2],[3] หรือที่ได้รับการตรวจสอบทางทฤษฎีแล้วอย่างใน [1] ขั้นตอนวิธีการควบคุมที่ใช้กับอาคารนี้จึงต้องคำนึงถึงการกระตุ้นที่ได้รับการควบคุมแบบประสานเวลาในทิศทางหลักเพียงทิศทางเดียวและการลดแรงสั่นสะเทือนในทิศทางตั้งฉาก เนื่องจากมีการคาดว่าการตอบสนองทางพลศาสตร์ส่วนใหญ่จะเกิดขึ้นในโหมดการสั่นพื้นฐาน ทั้งสองงานจึงควรใช้การควบคุมสัญญาณตอบกลับเชิงเส้นรวมทั้งประโยชน์ทั้งหมดของการควบคุมนี้เพื่อหลีกเลี่ยงความไม่มั่นคง สำหรับการควบคุมอย่างง่ายที่ใช้งานจริง การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉาก จะขับหัวขับที่เกี่ยวข้องด้วยผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ของโครงสร้างทั้งเจ็ด ซึ่งค่าเหล่านี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร ความเร็วของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร การขจัดของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร
สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักที่เลือกจะต้องเป็นค่าเพิ่มสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดสอบทางพลศาสตร์ของอาคารและไม่ใช้การปรับเปลี่ยนที่อิงกับความถี่ สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz) และเป็นผลรวมเชิงเส้นของค่าพลศาสตร์ที่วัดได้ก่อนหน้านั้น ไม่ใช้การจัดการกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) เพื่อเป็นหลักฐานแสดงประสิทธิภาพของหัวขับในการควบคุมการลดแรงสั่นสะเทือน สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยการขจัดที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนอื่นๆ จะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย และค่าควบคุมจะถูกปรับตาม
การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉากทำให้สามารถระบุคำสั่งแรงที่หัวขับได้ ซึ่งเป็นผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ทั้งเจ็ดของโครงการ ซึ่งค่าทั้งเจ็ดนี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและอาคาร ความเร็วของมวลหน่วงปรับค่าและอาคาร การขจัดของมวลหน่วงปรับค่าและอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและอาคาร สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักจะต้องเป็นค่าสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดลองทางพลศาสตร์ของอาคาร สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz)
และแฟกเตอร์ถ่วงน้ำหนักเป็นค่าสเกลาร์ ซึ่งไม่ใช้ฟังก์ชันถ่ายโอนที่อิงกับความถี่ในทุกรูปแบบ และสัญญาณตอบกลับเป็นผลรวมเชิงเส้นของคุณสมบัติทางพลศาสตร์ ไม่ใช้การจัดการหรือตรรกะกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) ดังนั้นสามารถปรับอินพุตแรงที่กระทำต่อมวลถ่วงปรับค่าในฐานะแรงควบคุมหัวขับได้ในแต่ละขั้นของเวลา รูปที่ 12 แสดงผลของการจําลองระเบียบวิธีสำหรับการยับยั้งแรงสั่นสะเทือน – การขจัดของอาคาร และการเคลื่อนที่ของมวลถ่วงปรับค่าที่เกิดขึ้น
สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนจะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย
และต้องปรับค่าควบคุมตาม การระบุแฟกเตอร์ถ่วงน้ำหนักสำหรับค่าชดเชยนี้จะระบุโดยลองเปลี่ยนค่าไปเรื่อยๆ จนกว่าจะได้ค่าที่เหมาะสม รูปที่ 13 แสดงผลลัพธ์ที่เป็นตัวเลขที่มีการรบกวนของน้ำหนักกระทำจากแรงลมกรรโชกสำหรับการสั่นกระตุ้นโดยมีการกระตุ้นแบบสมการไซน์อย่างง่ายและขั้นตอนวิธีการควบคุมที่ใช้
8.0 แนวคิดด้านความปลอดภัย
เมื่อพิจารณาแรง +/- 40 กิโลนิวตันซึ่งสร้างจากหัวขับเชิงเส้นที่ใช้ แนวคิดด้านความปลอดภัยที่รับรองว่าการขจัดของอาคารจะไม่เกินค่าความล้าที่กำหนดไว้จึงเป็นสิ่งที่สำคัญอย่างยิ่ง ซึ่งต้องใช้แม้ว่าเอาต์พุตแรงที่เกิดขึ้นไม่มากพอที่จะทำให้ส่วนบนสุดของอาคารเกิดการเบี่ยงจากตำแหน่งเดิมมากกว่าค่าที่กำหนดไว้ คือ +/-200 มม. แนวทางหนึ่งที่จะช่วยเสริมความปลอดภัยให้กับระบบ คือ การเพิ่มจำนวนเซ็นเซอร์ตรวจวัดการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคาร ซึ่งทำได้โดยการใช้ระบบควบคุมแยกต่างหากอีกระบบหนึ่งที่ควรใช้หลักการวัดอีกแบบหนึ่งซึ่งแตกต่างไปจากอุปกรณ์ควบคุมที่มีอยู่ สำหรับโครงการที่นำเสนอนี้ อุปกรณ์ควบคุมที่ใช้ดังกล่าว ได้แก่ มาตรวัดความเร่ง และเกณฑ์ขั้นต่ำของความเร่งที่กำหนดสำหรับการกรองความถี่ของสัญญาณภายในช่วงความถี่ธรรมชาติที่เกี่ยวข้องของโครงสร้าง ระบบควบคุมที่เหนือกว่าที่ใช้แทนก็คือระบบนำทางด้วยดาวเทียม (Global Navigation Satellite System, GNSS) ที่มีความแม่นยำ +/- 10 มม. ระบบนำทางด้วยดาวเทียมต้องมีสถานีฐานอ้างอิงสำหรับการประมวลผลข้อมูลพิกัดให้กลายเป็นค่าตอบกลับของการขจัดที่เกิดขึ้นจริง หากการขจัดของส่วนบนสุดของอาคารเกินกว่าเกณฑ์ที่กำหนดไว้ในระหว่างการสั่นกระตุ้นเทียม ซึ่งอาจมีสาเหตุมาจากแรงลมหรือการกระตุ้นอื่นๆ รีเลย์จะสลับสัญญาณไปเป็น 0 โวลต์ ซึ่งจะยกเลิกการสั่นกระตุ้น นอกจากนี้ ระบบควบคุมทั้งสองระบบยังตรวจสอบข้อมูลที่ได้มาอย่างต่อเนื่องเพื่อหาสัญญาณเซ็นเซอร์ที่ผิดพลาด ซึ่งจะทำให้เกิดการยกเลิกการสั่นกระตุ้นแบบแอคทีฟด้วยเช่นกัน สัญญาณความเร่ง/ขดลวดที่ผิดพลาดจะถูกตรวจจับโดยเกณฑ์ที่ดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงสเปกตรัม หากการดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงที่เกี่ยวข้องสามารถทำได้เท่านั้น จึงจะสามารถสรุปได้ว่าเซ็นเซอร์ส่งสัญญาณที่ถูกต้อง ในขณะที่ระบบนำทางด้วยดาวเทียมวิเคราะห์การเปลี่ยนแปลงของข้อมูลพิกัด แต่หากข้อมูลที่เก็บตัวอย่างไม่เปลี่ยนแปลงอย่างทันท่วงที ให้ถือว่าสัญญาณผิดพลาดได้เลย
9.0 การทดสอบแรงสั่นสะเทือน
การทดสอบแรงสั่นสะเทือนของอาคารครั้งแรกทำเมื่อตอนที่อาคารยังสร้างไม่เสร็จ ดังนั้นความถี่พื้นฐานของอาคารในสภาพนี้จึงสูงกว่าช่วงการปรับค่าของระบบมวลหน่วงปรับค่าแบบแพสซีฟที่กำหนด มวลหน่วงปรับค่าถูกปรับความถี่ในการปรับค่าให้สูงสุดเท่าที่จะเป็นไปได้ วัตถุประสงค์ของการทดสอบแรงสั่นสะเทือน คือ เพื่อระบุความถี่พื้นฐานของอาคารที่ปิดใช้งานระบบมวลหน่วงปรับค่า และการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้าง นอกจากนี้ ควรระบุพฤติกรรมเชิงพลศาสตร์ที่ใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ รวมถึงการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นเนื่องจากระบบมวลหน่วงปรับค่าแบบแพสซีฟด้วย การระบุความถี่ธรรมชาติพื้นฐานของอาคาร วิธีหาความหนาแน่นของสเปกตรัมพลังงานโดยใช้ค่าเฉลี่ยที่เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ (Averaged Normalized Power Spectral Density, ANPSD) [1] สามารถใช้ได้ เพื่อการนี้ ต้องแบ่งบันทึกเวลาออกเป็นส่วนๆ ซึ่งต้องเปลี่ยนส่วนเหล่านี้ให้เป็นโดเมนความถี่ ต้องเปลี่ยนค่าสเปกตรัมที่ได้ให้เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ จากนั้นนำไปหาค่าเฉลี่ยและคูณด้วยค่าสเปกตรัมเชิงซ้อนสังยุค
เมื่อทำเช่นนั้น แรงสั่นสะเทือนแบบสุ่มทั้งหมดจะถูกกำจัด และแรงสั่นสะเทือนอิสระของโครงสร้างที่เกิดซ้ำจะแสดงเป็นค่าสเปกตรัมเฉลี่ย ซึ่งจะเป็นความถี่ธรรมชาติของอาคารที่ถูกกระตุ้นเป็นหลัก รูปที่ 14 ซ้าย แสดงบันทึกเวลาของแรงสั่นสะเทือนแวดล้อมในแนวนอน ในทิศทาง x และ y โดยปิดใช้งานมวลหน่วงปรับค่า รูปที่ 14 ขวา แสดงค่าเฉลี่ยของสเปกตรัมพลังงานอัตโนมัติ (Auto Power Spectra) ที่ได้จากการแบ่งส่วนเวลาที่ยาว 120 วินาที สเปกตรัมเผยให้เห็นว่าอาคารแสดงถึงการตอบสนองทางพลศาสตร์ที่ความถี่หลักสองความถี่ (0.225 Hz ในทิศทาง x และ 0.245 Hz ในทิศทาง y)
นอกเหนือจากวิธีหาค่าสเปกตรัมพลังงานเฉลี่ย (Averaged Power Spectrum) ที่อธิบายไว้ข้างต้น ซึ่งถือว่าการกระตุ้นแวดล้อมก่อให้เกิดการตอบสนองทางพลศาสตร์ที่เพียงพอในโหมดแรงสั่นสะเทือนที่ศึกษา เพื่อเพิ่มความปลอดภัยแบบสุ่ม มีการระบุความถี่ธรรมชาติโดยใช้ซอฟต์แวร์ ARTEMIS ที่มีจำหน่ายทั่วไปเพื่อประมวลผลข้อมูลสัญญาณ [1] ซึ่งมีทั้งวิธีการแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition) และวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification)
การแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition, EFDD) และการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) เป็นเทคนิคที่ใช้กันอย่างแพร่หลายสำหรับการระบุตัวแปรในการสั่นที่ได้จากแรงเอาต์พุตที่ออกมาเท่านั้น
วิธีการแตกกระจายโดเมนความถี่แบบพิเศษ (EFDD) ใช้การคำนวณสเปกตรัมการตอบสนอง ดังนั้น บันทึกที่ยาวต้องรักษาระดับข้อผิดพลาดของค่าสเปกตรัมโดยประมาณให้อยู่ในระดับต่ำและสกัดตัวแปรในการสั่นด้วยวิธีที่เชื่อถือได้ ขั้นตอนวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ใช้ในการระบุความเชื่อมโยงโดยใช้แบบจำลองของแรงเอาต์พุตที่ออกมาเท่านั้น วิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ทำงานโดยขึ้นอยู่กับเวลาและขึ้นอยู่กับคำอธิบายสถานะในขณะนั้น (state space) ของปัญหาทางพลศาสตร์ ผลการระบุระบบที่ลำดับแบบจำลองต่างๆ จะถูกนำมาเปรียบเทียบกันเพื่อแยกการสั่นของโครงสร้างที่แท้จริงออกจากการสั่นเทียมในสิ่งที่เรียกว่าแผนภาพความเสถียร แผนภาพเหล่านี้เป็นวิธีที่นิยมใช้ในการเลือกแบบจำลองระบบที่ระบุ เพราะการสั่นของโครงสร้างที่แท้จริงมักจะเสถียรในลำดับแบบจำลองที่ต่อเนื่อง โดยจะมีขั้นตอนอัตโนมัติเพื่อประเมินความสอดคล้องกับเกณฑ์ความเสถียรที่กำหนดไว้ รูปที่ 15 แสดงบัตรความเสถียรของข้อมูลแวดล้อมที่บันทึกไว้ ซึ่งจะสามารถระบุการสั่นที่เกี่ยวข้องได้จากข้อมูลนี้ การสั่นที่ระบุและอัตราการหน่วงแรงสั่นสะเทือนที่ระบุสำหรับการสั่นแต่ละแบบในสถานะที่ปิดใช้งานมวลหน่วงปรับค่า (ซ้าย) และเปิดใช้งานมวลหน่วงปรับค่า (ขวา) แสดงในรูปที่ 14 เช่นกัน ซึ่งจะเห็นการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นด้วย การหน่วงแรงสั่นสะเทือนเพิ่มเติมของโครงสร้างอยู่ในช่วงค่าทางทฤษฎีที่สามารถระบุได้จากแบบจำลองทางทฤษฎีที่ใช้ในการปรับค่าของมวลหน่วงปรับค่าอีกครั้ง
นอกจากการทดสอบแรงสั่นสะเทือนแวดล้อมด้วยระบบมวลหน่วงปรับค่าแบบแพสซีฟแล้ว ยังมีการทดสอบเบื้องต้นด้วยการสั่นกระตุ้นแบบแอคทีฟด้วย โดยไม่คำนึงถึงสถานะที่ปรับใหม่ของระบบมวลหน่วงปรับค่า รูปที่ 12 ซ้าย แสดงบันทึกเวลาของความเร่งที่บันทึกไว้ที่ส่วนบนสุดของอาคาร หลังจากการกระตุ้นแบบสมการไซน์ครั้งแรก มีการใช้ขั้นตอนวิธีสำหรับระดับความเร่งคงที่เพื่อทดลองระบุค่าสหสัมพันธ์ระหว่างการเบี่ยงจากตำแหน่งเดิมของอาคารและการขจัดของมวลหน่วงปรับค่าที่เกิดจากแรง บันทึกเวลาที่แสดงในรูปที่ 12 แสดงเหตุการณ์ทดสอบของการสั่นกระตุ้น 2 เหตุการณ์ และสเปกตรัม FFT ที่เกี่ยวข้องแสดงการตอบสนองที่ชัดเจนของอาคารในความถี่พื้นฐานทั้งสองของอาคาร (ทิศทาง x และ y) ส่วนของเวลาที่เป็นสีเขียวคือการกระตุ้นแบบสมการไซน์ของมวลโดยปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้เกิดการตอบสนองเชิงพลศาสตร์ในทิศทางหลักทั้งสอง สเปกตรัม FFT ที่เกิดขึ้นแสดงจุดสูงสุดสองจุดเพื่อระบุความถี่พื้นฐานในทั้งสองทิศทาง ส่วนของเวลาที่เป็นสีน้ำเงินคือการกระตุ้นที่เปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้การขจัดของอาคารเคลื่อนที่ไปในทิศทางหลักทิศทางเดียวได้คงที่ยิ่งขึ้น การลดลงของแรงสั่นสะเทือนที่เกิดขึ้นหลังจากปิดการสั่นกระตุ้นถูกนำไปใช้เพื่อระบุการหน่วงแรงสั่นสะเทือนของโครงสร้างโดยได้ค่า D=2.4% ผลลัพธ์นี้สัมพันธ์กับอัตราการหน่วงแรงสั่นสะเทือนที่ระบุโดยใช้ขั้นตอนวิธี SSI
10.0 สรุปและการดำเนินงานในอนาคต
มีการติดตั้งมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ไว้ในหอทดสอบ Thyssen Krupp สูง 246 ม. โดยมีวัตถุประสงค์เพื่อเจตนากระตุ้นให้อาคารหอทดสอบนี้สั่นจนเกิดการตอบสนองทางพลศาสตร์แบบมีการควบคุมถึงความถี่พื้นฐานของตัวอาคาร วัตถุประสงค์ของการกระตุ้นนี้คือเพื่อหาค่าการแกว่งของอาคารในสองทิศทางหลัก จากการคำนวณทางคณิตศาสตร์พบว่าต้องใช้มวลหน่วงปรับค่าขนาด 240 ตันเพื่อให้ได้การหน่วงแรงสั่นสะเทือนเพิ่มเติมที่เพียงพอสำหรับการสั่นแบบแพสซีฟ และเพื่อสร้างแรงควบคุมที่เพียงพอที่จะทำให้การขจัดที่ส่วนบนสุดของอาคารอยู่ในช่วง +/- 200 มม. มีการพัฒนาและทดสอบขั้นตอนวิธีการควบคุมด้วยการจําลองระเบียบวิธีเชิงตัวเลขเพื่อสร้างระดับการขจัดที่คงที่สำหรับการสั่นกระตุ้นและเพื่อยับยั้งการขจัดที่เกิดจากแรงลมและส่วนประกอบของแรงสั่นสะเทือนที่ถูกทำให้สั่นในทิศทางตั้งฉาก หลังจากการติดตั้งระบบมวลหน่วงปรับค่าแบบลูกตุ้มแพสซีฟที่ใช้แผ่นคอนกรีตสำเร็จรูปเป็นมวลต้าน (reaction mass) มีการเปิดใช้งานหัวขับและทำการทดสอบเป็นครั้งแรก การทดสอบแสดงให้เห็นว่าการหน่วงแรงสั่นสะเทือนตามธรรมชาติของอาคารสูงกว่าที่คาดไว้ แต่สามารถระบุการสั่นที่เกี่ยวข้องทั้งหมดได้อย่างชัดเจน การสั่นกระตุ้นแบบแอคทีฟของอาคารทำงานได้ผลและสามารถทำการทดสอบได้ แม้ว่าจะไม่ถึงขั้นที่จะค้นพบตัวแปรในการทำงานจริงทั้งหมดก็ตาม ทั้งนี้เป็นเพราะอาคารยังสร้างไม่เสร็จสมบูรณ์ และด้วยเหตุนี้ จึงยังไม่สามารถปรับแต่งมวลหน่วงปรับค่าแบบแพสซีฟให้เข้ากับความถี่พื้นฐานที่กำหนดได้
ทันทีที่ปรับแต่งระบบมวลหน่วงปรับค่าได้แล้ว จะมีการทดสอบอาคารเพิ่มเติม ซึ่งจะรวมถึงการทดสอบเกี่ยวกับการหน่วงแรงสั่นสะเทือนที่ขึ้นอยู่กับแอมพลิจูดและการบูรณาการแนวคิดด้านความปลอดภัยด้วย
เอกสารอ้างอิง
[1] Wenzel, H.; Pichler, D.; Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M.; Andersen, P.; Mevel, L. (2012). “การวิเคราะห์ปฏิบัติการโมดอลโดยใช้วิธีการระบุสโตแคสติกแบบเร็ว”, การดำเนินการประชุมของสมาคมเพื่อการทดลองกลศาสตร์
[3] Soong, T.T.; Spencer, J.R. (2000). “การควบคุมโครงสร้างแบบ Active, Semi-Active และ Hybrid” ในการประชุมระดับโลกครั้งที่ 12 สำหรับวิศวกรรมแผ่นดินไหว
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). การควบคุมมวลหน่วงปรับค่าแบบพาสซีฟและแอคทีฟของการตอบสนองของอาคารสูงต่อลมกระโชกแรง. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A.; Kazuto, S. (2008). “Active Control of Structures”, Wiley, Padstow
1.0 บทนำ/ ประวัติความเป็นมา
หอสูง 246 ม. นี้ตั้งอยู่ในภาคตะวันตกเฉียงใต้ของประเทศเยอรมนี โดยสร้างขึ้นเพื่อเป็นอาคารสำหรับทดสอบนวัตกรรมของลิฟต์ หอนี้มีผังอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 20 ม. และมีพื้นที่ปล่องลิฟต์สำหรับทดสอบลิฟต์ได้ 9 ตัว ลิฟต์สำหรับใช้ในกรณีเพลิงไหม้หนึ่งตัว และลิฟต์แก้วที่เห็นทิวทัศน์ได้ในมุมกว้างอีกหนึ่งตัว นอกจากนี้ยังมีปล่องสูง 220 ม. อีกหนึ่งปล่องที่สามารถใช้เป็นปล่องลิฟต์เชิงกลเพื่อรับรองโปรแกรมทดสอบด้วย
ฐานอาคารเป็นรูปวงกลมที่มีเส้นผ่าศูนย์กลาง 40 ม. ซึ่งเป็นพื้นที่เพิ่มเติมสำหรับงานระบบอาคาร โถงต้อนรับ และศูนย์ศึกษา ที่ความสูง 232 ม. มีดาดฟ้าสำหรับสังเกตการณ์ที่สูงที่สุดในประเทศเยอรมนี สามารถมองเห็นทิวทัศน์ที่งดงามของป่าดำและเห็นไปถึงเทือกเขาแอลป์ในวันที่อากาศแจ่มใส
2.0 ระบบโครงสร้าง
ระบบโครงสร้างของหอทดสอบเป็นท่อคอนกรีตอัดแรงที่มีเส้นผ่าศูนย์กลาง 20.8 ม. ปักยึดแน่นเข้าไปในดินลึก 30 ม. (ดูรูปที่ 2) ผนังท่อนี้มีความหนา 40 ซม. จากฐานถึงความสูงที่ระดับ 110 ม. และจากระดับความสูงดังกล่าวเป็นต้นไปผนังท่อจะหนา 25 ซม. ดินในบริเวณนั้นเป็นชั้นหินแข็งที่เรียกว่า Keuper และมีชั้นหินปูนที่เกิดจากการทับถมของเปลือกหอยในยุคดึกดำบรรพ์อยู่ด้านใต้ ทำให้สามารถรับน้ำหนักได้สูง จึงไม่จำเป็นต้องมีการตอกเสาเข็มก่อนวางฐานราก นอกจากดินในบริเวณโดยรอบจะยึดให้หอตั้งอยู่อย่างมั่นคงแล้ว โครงสร้างฐานที่กว้างของหอก็ช่วยเสริมความแข็งแกร่งด้านข้างให้กับหอด้วย
การเสริมความแข็งแกร่งภายในของท่อคอนกรีตส่วนใหญ่เกิดจากผนังด้านในของปล่องลิฟต์ มีการติดตั้งแผ่นฝ้าเพดานสำเร็จรูปไว้ที่บางระดับความสูงเพื่อให้สามารถเข้าถึงปล่องลิฟต์ได้ ปล่องลิฟต์บางปล่องสิ้นสุดที่ระดับความสูง 115 ม. และปิดด้วยแผ่นพื้นช่วงพาดยาวหนา 40 ซม. ซึ่งเป็นพื้นแบบหล่อในที่ ชั้นอาคารเหล่านี้ใช้เป็นพื้นที่สำนักงาน ถัดขึ้นไปด้านบนเป็นพื้นที่ว่างเปล่าจนถึงที่ระดับความสูง 197 ม. ซึ่งใช้เป็นพื้นที่กักเก็บความร้อนและพื้นที่สำหรับระบบมวลหน่วงปรับค่า (TMD) ส่วนบนสุดของหอใช้เป็นพื้นที่สำนักงานและพื้นที่สำหรับปล่องลิฟต์ที่เหลือ
องค์ประกอบที่โดดเด่นของหอทดสอบนี้คือผนังด้านนอกของอาคารที่ทำจากแผ่นตาข่ายใยแก้วเคลือบด้วยพอลิเตตระฟลูออโรเอทิลีน (PTFE) ช่องตาข่ายกว้างขึ้นตามความสูงที่เพิ่มขึ้นของอาคาร โดยยิ่งสูงก็จะยิ่งโปร่งมากขึ้น ซึ่งช่วยลดความหนาแน่นและน้ำหนักของวัสดุและลดแรงต้านอากาศ
รูปทรงที่เป็นเกลียวของผนังด้านนอกของอาคารทำหน้าที่เป็นเกลียวลดการสั่นสะเทือนหรือเกลียว Scruton และตัวแผ่นผนังเองช่วยให้ร่มเงาแก่โครงสร้างคอนกรีตเพื่อหลีกเลี่ยงความเค้นที่เกิดจากความร้อนของแสงอาทิตย์ การออกแบบและการเลือกใช้วัสดุของผนังด้านนอกของอาคารคำนึงถึงการติดตั้ง การบำรุงรักษา ความคงทน และการรับแรงลม
3.0 ขั้นตอนการก่อสร้าง
การก่อสร้างหอทดสอบมีขั้นตอนดังต่อไปนี้:
- การขุดหลุมกลมลึก 30 ม. เพื่อวางฐานรากของอาคาร การขุดหลุมกลมนี้ทำได้โดยการวางระเบิด หลังจากขุดหลุมแล้ว มีการยึดไม่ให้ดินถล่มลงมาด้วยการฝังสมอยึดดินและการพ่นคอนกรีต
- การเทฐานรากแพ
- การก่อสร้างโครงสร้างคอนกรีตในแนวตั้งใช้การหล่อคอนกรีตแบบเลื่อน โดยมีการสร้างผนังทั้งหมดอย่างต่อเนื่องเป็นเวลา 4 เดือน
- การก่อสร้างแผ่นพื้น
- การก่อสร้างบริเวณทางเข้า
4.0 การตอบสนองทางพลศาสตร์ต่อแรงลมที่คาดไว้
ความถี่พื้นฐานของหอทดสอบคาดว่าจะอยู่ในช่วง 0.17 Hz – 0.20 Hz ต่อวินาที โดยขึ้นอยู่กับขั้นตอนการก่อสร้างและสถานะของคอนกรีต (แตกร้าว/ไม่แตกร้าว) – ดูรูปที่ 4
การวิเคราะห์ลมพบว่าจะเกิดการสั่นของโครงสร้างที่ความเร็วลมที่ตรงกับค่าความเร็วลมที่ระดับพื้นดิน (ความสูง 10 ม.) ซึ่งก็คือในช่วง 55 – 60 กม./ชม. หากไม่มีการหน่วงแรงสั่นสะเทือนเพิ่มเติม คาดว่าการสั่นของโครงสร้างนี้จะทำให้ส่วนบนของอาคารเบี่ยงจากตำแหน่งเดิมไปประมาณ +/- 750 มม. ซึ่งนอกจากจะทำให้ผู้คนในอาคารรู้สึกไม่สบายแล้ว ยังทำให้โครงสร้างคอนกรีตของอาคารเกิดความล้าเป็นอย่างมากด้วย ซึ่งจะลดอายุการใช้งานของโครงสร้าง (ดูรูปที่ 5) เพื่อลดการตอบสนองทางพลศาสตร์ที่มีต่อการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้าง จึงมีการใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ เนื่องจากอาคารนี้จะใช้เป็นหอทดสอบความไวของอุปกรณ์ลิฟต์ที่มีต่อการแกว่งของอาคาร เจ้าของโครงการจึงมองหาความเป็นไปได้ที่จะกระตุ้นอาคารให้แกว่งเทียมในวันที่ลมสงบ ซึ่งทำให้เกิดการขจัดที่ไม่ก่อให้เกิดปัญหาเรื่องความล้า ระดับการแกว่งเทียมตามคำขอของเจ้าของโครงการและถือว่าปลอดภัยคือประมาณ +/- 200 มม. คำขอของเจ้าของโครงการนี้เป็นโอกาสที่หาได้ยากในการใช้ตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (Hybrid Mass Damper, HMD) หรือที่เรียกว่า มวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) เนื่องจากระบบการออกแบบแตกต่างไปจากระบบตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริดอื่นๆ ที่เคยใช้ในอดีต ในบทถัดไปจะมีการนำเสนอข้อมูลเกี่ยวกับระบบนี้ รวมถึงการปรับแต่งระบบแพสซีฟ การออกแบบกลไกหัวขับ ขั้นตอนวิธีการควบคุม และแนวคิดด้านความปลอดภัย
5.0 การปรับแต่งระบบมวลหน่วงปรับค่าแบบแพสซีฟ
ต้องระบุตัวแปรของระบบมวลหน่วงปรับค่าแบบแพสซีฟโดยคำนึงถึงสามประเด็น ได้แก่ ก) เพื่อให้การหน่วงแรงสั่นสะเทือนเพิ่มเติมแก่โครงสร้างอย่างเพียงพอ เพื่อลดการตอบสนองทางพลศาสตร์ที่เกิดจากการสั่นเมื่อมีกระแสลมไหลวน ข) เพื่อจำกัดการเคลื่อนที่ของมวลหลักของมวลหน่วงปรับค่าในการสั่นแพสซีฟที่เกิดขึ้นให้อยู่ในค่าที่เป็นไปได้และสมเหตุสมผล สำหรับเวลาที่เกิดการสั่นเนื่องจากแรงลมกรรโชกที่มาปะทะด้านข้าง และ ค) เพื่อเลือกมวลหน่วงปรับค่าให้สอดคล้องอินพุตของพลังงานที่จะทำให้เกิดการเบี่ยงสูงสุดจากตำแหน่งเดิมของอาคารในการสั่นกระตุ้น โดยพิจารณาประสิทธิภาพในการต้านแรงลมที่เกิดขึ้นจากหัวขับที่มี (หรือ แรงสูงสุดที่เกิดขึ้นและช่วงแรงชักสูงสุดในระหว่างการปฏิบัติงาน) มีการใช้แบบจำลองทางคณิตศาสตร์เพื่อปรับแต่งระบบมวลหน่วงปรับค่า ซึ่งแสดงถึงการกระจายมวลน้ำหนักของอาคารและโมเมนต์ความเฉื่อยของมวลตามที่รายงานไว้ในคุณสมบัติทางโครงสร้างที่กำหนด องค์ประกอบเพื่อความแข็งแกร่งระหว่างพื้นอาคารได้รับการออกแบบมาให้สอดคล้องกับรูปแบบการสั่นและความถี่ธรรมชาติที่ได้จากการสังเกตการณ์อย่างเต็มรูปแบบ รูปที่ 6 ซ้าย แสดงรูปแบบการสั่นและความถี่ธรรมชาติของแบบจำลองเปรียบเทียบที่ใช้ นอกจากนี้ รูปที่ 6 ซ้าย ยังแสดงรูปแบบการสั่นของแบบจำลองเปรียบเทียบโดยเทียบกับต้นแบบอย่างละเอียดของที่จัดทำโดยปรึกษาด้านโครงสร้างด้วย
นอกจากนี้ ยังมีการสร้างแบบจำลองมวลหน่วงปรับค่าแยกต่างหากให้เป็นระบบลูกตุ้มที่สามารถจับตำแหน่งเยื้องศูนย์กลางของตัวมวลเองในหออาคารได้ด้วย คุณลักษณะของน้ำหนักกระทำสำหรับควบคุมแรงป้อนที่มากระทำหรือการสั่นของโครงสร้างเนื่องจากกระแสลมไหลวนก็เหมือนกับการกระตุ้นให้เกิดการสั่นด้วยการเคลื่อนที่แบบฮาร์มอนิกอย่างง่าย อย่างไรก็ตาม แรงลมกรรโชกที่มีอยู่เป็นลักษณะตามธรรมชาติที่เกิดขึ้นแบบสุ่ม ดังนั้นจึงต้องใช้เกณฑ์ในการปรับแต่งอื่นที่นอกเหนือจากเกณฑ์ Den Hartog อันเป็นที่รู้จักกันดี นอกจากนี้ การเคลื่อนที่สัมพัทธ์ของมวลหน่วงปรับค่าของแรงลมแบบสุ่มยังมากกว่าแบบฮาร์มอนิกด้วย การกำหนดค่าตัวเลขของตัวแปรที่เหมาะสมของมวลหน่วงปรับค่าควรพิจารณาแรงลมที่ใกล้เคียงกับความเป็นจริงมากที่สุด บันทึกเวลาที่สร้างขึ้นมีทั้งแรงลมกรรโชกแบบสุ่ม (ตามสเปกตรัม Davenport) และการสั่นที่มีความถี่ตรงกัน กระแสลมไหลวน ส่วนประกอบที่แสดงถึงการสั่นที่เกิดจากแรงลมที่มาปะทะด้านข้างโดยรวม (ดูรูปที่ 3 ขวา) การลดการเบี่ยงจากตำแหน่งเดิมของอาคารเกิดจากระบบมวลหน่วงปรับค่าแบบแพสซีฟที่ปรับแต่งแล้ว และการขจัดของมวลหน่วงปรับค่าที่เกิดขึ้นแสดงอยู่ในรูปที่ 3 ขวา จากผลการทดสอบเหล่านี้ที่มีค่าการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้างโดยประมาณ ξ=0.8 % สามารถระบุได้ว่าต้องใช้มวลหน่วงปรับค่าหนัก 240 ตันเพื่อให้ได้การขจัดในขอบเขต +/- 650 มม. โดยที่ยังคงรักษาอัตราการหน่วงของมวลหน่วงปรับค่าไว้ได้ในระดับที่เหมาะสม เพื่อให้มวลหน่วงปรับค่ามีประสิทธิภาพสูงสุด การหน่วงที่เพิ่มขึ้นของมวลหน่วงปรับค่าจะช่วยลดระยะการเคลื่อนที่พร้อมทั้งยังคงมีสมรรถนะที่เพียงพอ แต่อาจส่งผลเสียต่อแรงที่เกิดจากหัวขับ เพื่อระบุแรงที่ต้องใช้ให้การปรับตั้งมวลหน่วงปรับค่าขนาด 240 ตันให้เหมาะสม จึงมีการใช้แบบจำลองเปรียบเทียบเพื่อตรวจสอบว่า ด้วยแรงสูงสุด 40 กิโลนิวตันจากหัวขับ อาคารจะเบี่ยงจากตำแหน่งเดิมในช่วง +/- 200 มม. ได้หรือไม่ รูปที่ 4 แสดงผลของการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลาบนแบบจำลองเปรียบเทียบทางคณิตศาสตร์ ซึ่งในที่นี่แสดงการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคารที่เกิดขึ้น การเบี่ยงจากตำแหน่งเดิมของมวลหน่วงปรับค่า และแรงอินพุตกระทำอย่างต่อเนื่องที่เป็นสาเหตุของการเบี่ยงจากตำแหน่งเดิมดังกล่าว
6.0 คำอธิบายระบบควบคุม
การทำงานเป็นคู่ของระบบควบคุมตอบโจทย์ ก) วัตถุประสงค์ในลดการใช้พลังงานในขณะทำงานแบบแพสซีฟตามปกติเพื่อลดแรงสั่นสะเทือนที่เกิดขึ้น ข) วัตถุประสงค์ในการลดแรงที่หัวขับต้องใช้ด้วยการใช้ปรากฏการณ์เรโซแนนซ์เพื่อกระตุ้นมวลหน่วงปรับค่าหลักให้ได้แรงจริงสูงสุดตามที่ต้องการ ดังนั้นเมื่อเทียบกับระบบควบคุมอื่นๆ (ดูรูปที่ 1) หัวขับจะเชื่อมต่อโครงสร้างหลักและมวลหน่วงปรับค่าเข้าด้วยกัน แต่ไม่ใช้เพื่อควบคุมมวลหน่วงปรับค่าโดยตรง มิฉะนั้นจะกลายเป็นระบบตัวขับมวลแบบแอคทีฟ (Active Mass Driver) หรือตัวหน่วงทั่วไป สำหรับมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ที่ใช้ อาคารนี้เลือกใช้มวลตอบสนองสำหรับการทำงานแบบแพสซีฟที่มีน้ำหนัก 240 ตัน สำหรับการสั่นกระตุ้นมีหัวขับเชิงเส้นสองหัว หนึ่งหัวต่อหนึ่งทิศทางหลัก ซึ่งยึดติดอยู่กับมวลหน่วงปรับค่าด้วยข้อต่อหมุนใกล้กับจุดศูนย์ถ่วงของมวลเพื่อหลีกเลี่ยงแรงบิดที่ไม่พึงประสงค์ หัวขับเชิงเส้นแต่ละตัวสามารถสร้างแรงได้ถึง 40 กิโลนิวตันได้ภายในช่วงชักสูงสุด +/- 600 มม. เพียงช่วงเดียว (ดูรายละเอียดในรูปที่ 2) หัวขับเชิงเส้นสามารถถอดออกได้ ดังนั้นการสั่นแบบแพสซีฟทั้งหมดจะไม่ได้รับผลกระทบจากตลับลูกปืนของหัวขับในกรณีที่ตลับลูกปืนเกิดความขัดข้อง ซึ่งเป็นกรณีที่เกิดขึ้นได้ยาก
ระบบประกอบด้วยมาตรวัดความเร่งแกนเดียวสี่ตัว (คานรูปตัว K สำหรับรับแรงแผ่นดินไหว/MEMS หนึ่งคานต่อหนึ่งทิศทาง) เพื่อระบุระดับสูงสุดของอาคารและความเร่งของมวลหน่วงปรับค่า สัญญาณความเร่งจะถูกกรองความถี่ภายในช่วงความถี่ธรรมชาติพื้นฐานของอาคาร (0.1 – 0.3 Hz) และหาค่าปริพันธ์เพื่อให้ความเร็วและการเบี่ยงจากตำแหน่งเดิมแก่อาคาร นอกจากนี้ ค่าการขจัดที่หาค่าปริพันธ์แล้วสามารถนำไปเปรียบเทียบกับค่าที่วัดได้จากระบบนำทางด้วยดาวเทียมที่ติดตั้งเสริมไว้ที่ด้านบนสุดได้ด้วย เพื่อเปรียบเทียบค่าคลาดเคลื่อนของสัญญาณ จากนั้นจะทำการทดสอบสหสัมพันธ์ตามข้อมูลที่ได้ นอกจากนี้ มีการควบคุมการขจัดของมวลหน่วงปรับค่าโดยตรงด้วยอุปกรณ์แปลงพลังงานหรือทรานสดิวเซอร์แบบขดลวดและระบบวัดความยาวแบบเหนี่ยวนำที่อยู่ในมอเตอร์เชิงเส้น
7.0 ขั้นตอนวิธีการควบคุม
วงจรการควบคุมทั่วไปของอาคารแสดงไว้ในรูปที่ 5 ซึ่งแสดงลำดับการควบคุมแบบวงจรปิด การออกแบบอย่างละเอียดของขั้นตอนวิธีการควบคุมจะต้องมีแบบจำลองเชิงวิเคราะห์ของปฏิสัมพันธ์ระหว่างหัวขับกับมวลหน่วงปรับค่า เพื่อระบุความสัมพันธ์ระหว่างอินพุตแรงจากหัวขับและแรงกระทำที่ใช้ ซึ่งต้องใช้ร่วมกับแบบจำลองเชิงวิเคราะห์ของโครงสร้างหลักที่อธิบายพฤติกรรมเชิงพลศาสตร์โดยรวมของอาคาร นอกจากนี้ เมื่อเปรียบเทียบกับขั้นตอนวิธีการควบคุมมาตรฐานที่ใช้กับตัวหน่วงการสั่นสะเทือนด้วยมวลแบบไฮบริด (HMD) เช่น ใน [2],[3] หรือที่ได้รับการตรวจสอบทางทฤษฎีแล้วอย่างใน [1] ขั้นตอนวิธีการควบคุมที่ใช้กับอาคารนี้จึงต้องคำนึงถึงการกระตุ้นที่ได้รับการควบคุมแบบประสานเวลาในทิศทางหลักเพียงทิศทางเดียวและการลดแรงสั่นสะเทือนในทิศทางตั้งฉาก เนื่องจากมีการคาดว่าการตอบสนองทางพลศาสตร์ส่วนใหญ่จะเกิดขึ้นในโหมดการสั่นพื้นฐาน ทั้งสองงานจึงควรใช้การควบคุมสัญญาณตอบกลับเชิงเส้นรวมทั้งประโยชน์ทั้งหมดของการควบคุมนี้เพื่อหลีกเลี่ยงความไม่มั่นคง สำหรับการควบคุมอย่างง่ายที่ใช้งานจริง การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉาก จะขับหัวขับที่เกี่ยวข้องด้วยผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ของโครงสร้างทั้งเจ็ด ซึ่งค่าเหล่านี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร ความเร็วของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร การขจัดของมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและส่วนบนสุดของอาคาร สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักที่เลือกจะต้องเป็นค่าเพิ่มสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดสอบทางพลศาสตร์ของอาคารและไม่ใช้การปรับเปลี่ยนที่อิงกับความถี่ สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz) และเป็นผลรวมเชิงเส้นของค่าพลศาสตร์ที่วัดได้ก่อนหน้านั้น ไม่ใช้การจัดการกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) เพื่อเป็นหลักฐานแสดงประสิทธิภาพของหัวขับในการควบคุมการลดแรงสั่นสะเทือน สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยการขจัดที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนอื่นๆ จะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย และค่าควบคุมจะถูกปรับตาม
การควบคุมสัญญาณตอบกลับเชิงเส้นที่ลดการตอบสนองทางพลศาสตร์ของอาคารที่มีต่อการกระตุ้นในทิศทางตั้งฉากทำให้สามารถระบุคำสั่งแรงที่หัวขับได้ ซึ่งเป็นผลรวมเชิงเส้นถ่วงน้ำหนักจำเพาะของค่าพลศาสตร์ทั้งเจ็ดของโครงการ ซึ่งค่าทั้งเจ็ดนี้ ได้แก่: ความเร่งของมวลหน่วงปรับค่าและอาคาร ความเร็วของมวลหน่วงปรับค่าและอาคาร การขจัดของมวลหน่วงปรับค่าและอาคาร และการขจัดสัมพัทธ์ระหว่างมวลหน่วงปรับค่าและอาคาร สิ่งสำคัญคือต้องจำไว้ว่าแฟกเตอร์ถ่วงน้ำหนักจะต้องเป็นค่าสเกลาร์จำนวนเต็มบวกหรือลบ การกำหนดค่าตัวแปรของแฟกเตอร์ถ่วงน้ำหนักขึ้นอยู่กับการทดลองทางพลศาสตร์ของอาคาร สัญญาณตอบกลับของหัวขับที่เกิดขึ้นจะได้รับการคำนวณในทันที (ที่ 50 Hz) และแฟกเตอร์ถ่วงน้ำหนักเป็นค่าสเกลาร์ ซึ่งไม่ใช้ฟังก์ชันถ่ายโอนที่อิงกับความถี่ในทุกรูปแบบ และสัญญาณตอบกลับเป็นผลรวมเชิงเส้นของคุณสมบัติทางพลศาสตร์ ไม่ใช้การจัดการหรือตรรกะกับค่าที่ไม่ใช่ค่าเชิงเส้น การออกแบบการควบคุมถูกใช้ในการจําลองระเบียบวิธีเชิงตัวเลขที่ขึ้นอยู่กับเวลา (หรือการหาค่าปริพันธ์โดยตรง) ดังนั้นสามารถปรับอินพุตแรงที่กระทำต่อมวลถ่วงปรับค่าในฐานะแรงควบคุมหัวขับได้ในแต่ละขั้นของเวลา รูปที่ 12 แสดงผลของการจําลองระเบียบวิธีสำหรับการยับยั้งแรงสั่นสะเทือน – การขจัดของอาคาร และการเคลื่อนที่ของมวลถ่วงปรับค่าที่เกิดขึ้น
สำหรับการสั่นกระตุ้นจะใช้แนวทางการควบคุมเดียวกันนี้ร่วมกับค่าชดเชยที่แสดงให้เห็นถึงการกระตุ้นให้อาคารสั่นจนถึงค่าการขจัดที่ต้องการ ค่าชดเชยนี้เป็นฟังก์ชันเส้นโค้งไซน์ของความถี่พื้นฐานที่ตรวจวัดได้ในแต่ละทิศทาง เอาต์พุตจากการควบคุมที่หักล้างความแปรผันของการขจัดที่ส่วนบนสุดของอาคารเนื่องจากสิ่งรบกวนอื่นๆ จะถูกปรับลดในฟังก์ชันเส้นโค้งไซน์ของค่าชดเชย และต้องปรับค่าควบคุมตาม การระบุแฟกเตอร์ถ่วงน้ำหนักสำหรับค่าชดเชยนี้จะระบุโดยลองเปลี่ยนค่าไปเรื่อยๆ จนกว่าจะได้ค่าที่เหมาะสม รูปที่ 13 แสดงผลลัพธ์ที่เป็นตัวเลขที่มีการรบกวนของน้ำหนักกระทำจากแรงลมกรรโชกสำหรับการสั่นกระตุ้นโดยมีการกระตุ้นแบบสมการไซน์อย่างง่ายและขั้นตอนวิธีการควบคุมที่ใช้
8.0 แนวคิดด้านความปลอดภัย
เมื่อพิจารณาแรง +/- 40 กิโลนิวตันซึ่งสร้างจากหัวขับเชิงเส้นที่ใช้ แนวคิดด้านความปลอดภัยที่รับรองว่าการขจัดของอาคารจะไม่เกินค่าความล้าที่กำหนดไว้จึงเป็นสิ่งที่สำคัญอย่างยิ่ง ซึ่งต้องใช้แม้ว่าเอาต์พุตแรงที่เกิดขึ้นไม่มากพอที่จะทำให้ส่วนบนสุดของอาคารเกิดการเบี่ยงจากตำแหน่งเดิมมากกว่าค่าที่กำหนดไว้ คือ +/-200 มม. แนวทางหนึ่งที่จะช่วยเสริมความปลอดภัยให้กับระบบ คือ การเพิ่มจำนวนเซ็นเซอร์ตรวจวัดการเบี่ยงจากตำแหน่งเดิมของส่วนบนสุดของอาคาร ซึ่งทำได้โดยการใช้ระบบควบคุมแยกต่างหากอีกระบบหนึ่งที่ควรใช้หลักการวัดอีกแบบหนึ่งซึ่งแตกต่างไปจากอุปกรณ์ควบคุมที่มีอยู่ สำหรับโครงการที่นำเสนอนี้ อุปกรณ์ควบคุมที่ใช้ดังกล่าว ได้แก่ มาตรวัดความเร่ง และเกณฑ์ขั้นต่ำของความเร่งที่กำหนดสำหรับการกรองความถี่ของสัญญาณภายในช่วงความถี่ธรรมชาติที่เกี่ยวข้องของโครงสร้าง ระบบควบคุมที่เหนือกว่าที่ใช้แทนก็คือระบบนำทางด้วยดาวเทียม (Global Navigation Satellite System, GNSS) ที่มีความแม่นยำ +/- 10 มม. ระบบนำทางด้วยดาวเทียมต้องมีสถานีฐานอ้างอิงสำหรับการประมวลผลข้อมูลพิกัดให้กลายเป็นค่าตอบกลับของการขจัดที่เกิดขึ้นจริง หากการขจัดของส่วนบนสุดของอาคารเกินกว่าเกณฑ์ที่กำหนดไว้ในระหว่างการสั่นกระตุ้นเทียม ซึ่งอาจมีสาเหตุมาจากแรงลมหรือการกระตุ้นอื่นๆ รีเลย์จะสลับสัญญาณไปเป็น 0 โวลต์ ซึ่งจะยกเลิกการสั่นกระตุ้น นอกจากนี้ ระบบควบคุมทั้งสองระบบยังตรวจสอบข้อมูลที่ได้มาอย่างต่อเนื่องเพื่อหาสัญญาณเซ็นเซอร์ที่ผิดพลาด ซึ่งจะทำให้เกิดการยกเลิกการสั่นกระตุ้นแบบแอคทีฟด้วยเช่นกัน สัญญาณความเร่ง/ขดลวดที่ผิดพลาดจะถูกตรวจจับโดยเกณฑ์ที่ดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงสเปกตรัม หากการดึงเฉพาะค่าที่จุดสูงสุดของคลื่นสัญญาณในช่วงที่เกี่ยวข้องสามารถทำได้เท่านั้น จึงจะสามารถสรุปได้ว่าเซ็นเซอร์ส่งสัญญาณที่ถูกต้อง ในขณะที่ระบบนำทางด้วยดาวเทียมวิเคราะห์การเปลี่ยนแปลงของข้อมูลพิกัด แต่หากข้อมูลที่เก็บตัวอย่างไม่เปลี่ยนแปลงอย่างทันท่วงที ให้ถือว่าสัญญาณผิดพลาดได้เลย
9.0 การทดสอบแรงสั่นสะเทือน
การทดสอบแรงสั่นสะเทือนของอาคารครั้งแรกทำเมื่อตอนที่อาคารยังสร้างไม่เสร็จ ดังนั้นความถี่พื้นฐานของอาคารในสภาพนี้จึงสูงกว่าช่วงการปรับค่าของระบบมวลหน่วงปรับค่าแบบแพสซีฟที่กำหนด มวลหน่วงปรับค่าถูกปรับความถี่ในการปรับค่าให้สูงสุดเท่าที่จะเป็นไปได้ วัตถุประสงค์ของการทดสอบแรงสั่นสะเทือน คือ เพื่อระบุความถี่พื้นฐานของอาคารที่ปิดใช้งานระบบมวลหน่วงปรับค่า และการหน่วงแรงสั่นสะเทือนโดยธรรมชาติของโครงสร้าง นอกจากนี้ ควรระบุพฤติกรรมเชิงพลศาสตร์ที่ใช้ระบบมวลหน่วงปรับค่าแบบแพสซีฟ รวมถึงการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นเนื่องจากระบบมวลหน่วงปรับค่าแบบแพสซีฟด้วย การระบุความถี่ธรรมชาติพื้นฐานของอาคาร วิธีหาความหนาแน่นของสเปกตรัมพลังงานโดยใช้ค่าเฉลี่ยที่เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ (Averaged Normalized Power Spectral Density, ANPSD) [1] สามารถใช้ได้ เพื่อการนี้ ต้องแบ่งบันทึกเวลาออกเป็นส่วนๆ ซึ่งต้องเปลี่ยนส่วนเหล่านี้ให้เป็นโดเมนความถี่ ต้องเปลี่ยนค่าสเปกตรัมที่ได้ให้เป็นตัวเลขสัญกรณ์วิทยาศาสตร์ จากนั้นนำไปหาค่าเฉลี่ยและคูณด้วยค่าสเปกตรัมเชิงซ้อนสังยุค
เมื่อทำเช่นนั้น แรงสั่นสะเทือนแบบสุ่มทั้งหมดจะถูกกำจัด และแรงสั่นสะเทือนอิสระของโครงสร้างที่เกิดซ้ำจะแสดงเป็นค่าสเปกตรัมเฉลี่ย ซึ่งจะเป็นความถี่ธรรมชาติของอาคารที่ถูกกระตุ้นเป็นหลัก รูปที่ 14 ซ้าย แสดงบันทึกเวลาของแรงสั่นสะเทือนแวดล้อมในแนวนอน ในทิศทาง x และ y โดยปิดใช้งานมวลหน่วงปรับค่า รูปที่ 14 ขวา แสดงค่าเฉลี่ยของสเปกตรัมพลังงานอัตโนมัติ (Auto Power Spectra) ที่ได้จากการแบ่งส่วนเวลาที่ยาว 120 วินาที สเปกตรัมเผยให้เห็นว่าอาคารแสดงถึงการตอบสนองทางพลศาสตร์ที่ความถี่หลักสองความถี่ (0.225 Hz ในทิศทาง x และ 0.245 Hz ในทิศทาง y)
นอกเหนือจากวิธีหาค่าสเปกตรัมพลังงานเฉลี่ย (Averaged Power Spectrum) ที่อธิบายไว้ข้างต้น ซึ่งถือว่าการกระตุ้นแวดล้อมก่อให้เกิดการตอบสนองทางพลศาสตร์ที่เพียงพอในโหมดแรงสั่นสะเทือนที่ศึกษา เพื่อเพิ่มความปลอดภัยแบบสุ่ม มีการระบุความถี่ธรรมชาติโดยใช้ซอฟต์แวร์ ARTEMIS ที่มีจำหน่ายทั่วไปเพื่อประมวลผลข้อมูลสัญญาณ [1] ซึ่งมีทั้งวิธีการแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition) และวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification)
การแตกกระจายโดเมนความถี่แบบเสริมเพิ่ม (Enhanced Frequency Domain Decomposition, EFDD) และการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) เป็นเทคนิคที่ใช้กันอย่างแพร่หลายสำหรับการระบุตัวแปรในการสั่นที่ได้จากแรงเอาต์พุตที่ออกมาเท่านั้น
วิธีการแตกกระจายโดเมนความถี่แบบพิเศษ (EFDD) ใช้การคำนวณสเปกตรัมการตอบสนอง ดังนั้น บันทึกที่ยาวต้องรักษาระดับข้อผิดพลาดของค่าสเปกตรัมโดยประมาณให้อยู่ในระดับต่ำและสกัดตัวแปรในการสั่นด้วยวิธีที่เชื่อถือได้ ขั้นตอนวิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ใช้ในการระบุความเชื่อมโยงโดยใช้แบบจำลองของแรงเอาต์พุตที่ออกมาเท่านั้น วิธีการระบุพื้นที่ย่อยแบบสุ่ม (Stochastic Subspace Identification) ทำงานโดยขึ้นอยู่กับเวลาและขึ้นอยู่กับคำอธิบายสถานะในขณะนั้น (state space) ของปัญหาทางพลศาสตร์ ผลการระบุระบบที่ลำดับแบบจำลองต่างๆ จะถูกนำมาเปรียบเทียบกันเพื่อแยกการสั่นของโครงสร้างที่แท้จริงออกจากการสั่นเทียมในสิ่งที่เรียกว่าแผนภาพความเสถียร แผนภาพเหล่านี้เป็นวิธีที่นิยมใช้ในการเลือกแบบจำลองระบบที่ระบุ เพราะการสั่นของโครงสร้างที่แท้จริงมักจะเสถียรในลำดับแบบจำลองที่ต่อเนื่อง โดยจะมีขั้นตอนอัตโนมัติเพื่อประเมินความสอดคล้องกับเกณฑ์ความเสถียรที่กำหนดไว้ รูปที่ 15 แสดงบัตรความเสถียรของข้อมูลแวดล้อมที่บันทึกไว้ ซึ่งจะสามารถระบุการสั่นที่เกี่ยวข้องได้จากข้อมูลนี้ การสั่นที่ระบุและอัตราการหน่วงแรงสั่นสะเทือนที่ระบุสำหรับการสั่นแต่ละแบบในสถานะที่ปิดใช้งานมวลหน่วงปรับค่า (ซ้าย) และเปิดใช้งานมวลหน่วงปรับค่า (ขวา) แสดงในรูปที่ 14 เช่นกัน ซึ่งจะเห็นการหน่วงแรงสั่นสะเทือนของโครงสร้างที่เพิ่มขึ้นด้วย การหน่วงแรงสั่นสะเทือนเพิ่มเติมของโครงสร้างอยู่ในช่วงค่าทางทฤษฎีที่สามารถระบุได้จากแบบจำลองทางทฤษฎีที่ใช้ในการปรับค่าของมวลหน่วงปรับค่าอีกครั้ง นอกจากการทดสอบแรงสั่นสะเทือนแวดล้อมด้วยระบบมวลหน่วงปรับค่าแบบแพสซีฟแล้ว ยังมีการทดสอบเบื้องต้นด้วยการสั่นกระตุ้นแบบแอคทีฟด้วย โดยไม่คำนึงถึงสถานะที่ปรับใหม่ของระบบมวลหน่วงปรับค่า รูปที่ 12 ซ้าย แสดงบันทึกเวลาของความเร่งที่บันทึกไว้ที่ส่วนบนสุดของอาคาร หลังจากการกระตุ้นแบบสมการไซน์ครั้งแรก มีการใช้ขั้นตอนวิธีสำหรับระดับความเร่งคงที่เพื่อทดลองระบุค่าสหสัมพันธ์ระหว่างการเบี่ยงจากตำแหน่งเดิมของอาคารและการขจัดของมวลหน่วงปรับค่าที่เกิดจากแรง บันทึกเวลาที่แสดงในรูปที่ 12 แสดงเหตุการณ์ทดสอบของการสั่นกระตุ้น 2 เหตุการณ์ และสเปกตรัม FFT ที่เกี่ยวข้องแสดงการตอบสนองที่ชัดเจนของอาคารในความถี่พื้นฐานทั้งสองของอาคาร (ทิศทาง x และ y) ส่วนของเวลาที่เป็นสีเขียวคือการกระตุ้นแบบสมการไซน์ของมวลโดยปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้เกิดการตอบสนองเชิงพลศาสตร์ในทิศทางหลักทั้งสอง สเปกตรัม FFT ที่เกิดขึ้นแสดงจุดสูงสุดสองจุดเพื่อระบุความถี่พื้นฐานในทั้งสองทิศทาง ส่วนของเวลาที่เป็นสีน้ำเงินคือการกระตุ้นที่เปิดใช้งานการควบคุมแบบแอคทีฟ ซึ่งทำให้การขจัดของอาคารเคลื่อนที่ไปในทิศทางหลักทิศทางเดียวได้คงที่ยิ่งขึ้น การลดลงของแรงสั่นสะเทือนที่เกิดขึ้นหลังจากปิดการสั่นกระตุ้นถูกนำไปใช้เพื่อระบุการหน่วงแรงสั่นสะเทือนของโครงสร้างโดยได้ค่า D=2.4% ผลลัพธ์นี้สัมพันธ์กับอัตราการหน่วงแรงสั่นสะเทือนที่ระบุโดยใช้ขั้นตอนวิธี SSI
10.0 สรุปและการดำเนินงานในอนาคต
มีการติดตั้งมวลหน่วงปรับค่าที่ใช้งานได้สองแบบ (Dual Use TMD) ไว้ในหอทดสอบ Thyssen Krupp สูง 246 ม. โดยมีวัตถุประสงค์เพื่อเจตนากระตุ้นให้อาคารหอทดสอบนี้สั่นจนเกิดการตอบสนองทางพลศาสตร์แบบมีการควบคุมถึงความถี่พื้นฐานของตัวอาคาร วัตถุประสงค์ของการกระตุ้นนี้คือเพื่อหาค่าการแกว่งของอาคารในสองทิศทางหลัก จากการคำนวณทางคณิตศาสตร์พบว่าต้องใช้มวลหน่วงปรับค่าขนาด 240 ตันเพื่อให้ได้การหน่วงแรงสั่นสะเทือนเพิ่มเติมที่เพียงพอสำหรับการสั่นแบบแพสซีฟ และเพื่อสร้างแรงควบคุมที่เพียงพอที่จะทำให้การขจัดที่ส่วนบนสุดของอาคารอยู่ในช่วง +/- 200 มม. มีการพัฒนาและทดสอบขั้นตอนวิธีการควบคุมด้วยการจําลองระเบียบวิธีเชิงตัวเลขเพื่อสร้างระดับการขจัดที่คงที่สำหรับการสั่นกระตุ้นและเพื่อยับยั้งการขจัดที่เกิดจากแรงลมและส่วนประกอบของแรงสั่นสะเทือนที่ถูกทำให้สั่นในทิศทางตั้งฉาก หลังจากการติดตั้งระบบมวลหน่วงปรับค่าแบบลูกตุ้มแพสซีฟที่ใช้แผ่นคอนกรีตสำเร็จรูปเป็นมวลต้าน (reaction mass) มีการเปิดใช้งานหัวขับและทำการทดสอบเป็นครั้งแรก การทดสอบแสดงให้เห็นว่าการหน่วงแรงสั่นสะเทือนตามธรรมชาติของอาคารสูงกว่าที่คาดไว้ แต่สามารถระบุการสั่นที่เกี่ยวข้องทั้งหมดได้อย่างชัดเจน การสั่นกระตุ้นแบบแอคทีฟของอาคารทำงานได้ผลและสามารถทำการทดสอบได้ แม้ว่าจะไม่ถึงขั้นที่จะค้นพบตัวแปรในการทำงานจริงทั้งหมดก็ตาม ทั้งนี้เป็นเพราะอาคารยังสร้างไม่เสร็จสมบูรณ์ และด้วยเหตุนี้ จึงยังไม่สามารถปรับแต่งมวลหน่วงปรับค่าแบบแพสซีฟให้เข้ากับความถี่พื้นฐานที่กำหนดได้
ทันทีที่ปรับแต่งระบบมวลหน่วงปรับค่าได้แล้ว จะมีการทดสอบอาคารเพิ่มเติม ซึ่งจะรวมถึงการทดสอบเกี่ยวกับการหน่วงแรงสั่นสะเทือนที่ขึ้นอยู่กับแอมพลิจูดและการบูรณาการแนวคิดด้านความปลอดภัยด้วย
เอกสารอ้างอิง
[1] Wenzel, H.; Pichler, D.; Schedler, R. (1991). “Ambiente Schwingungsmessungen zur System und Schadenserkennung an Tragwerken”, Bauingenieur 74
[2] Döhler, M.; Andersen, P.; Mevel, L. (2012). “การวิเคราะห์โมดอลปฏิบัติการโดยใช้วิธีการระบุสโตแคสติกอย่างรวดเร็ว”, การดำเนินการประชุมของสมาคมเพื่อการทดลองกลศาสตร์
[3] Soong, T.T.; Spencer, J.R. (2000). “การควบคุมโครงสร้างแบบ Active, Semi-Active and hybrid” ในการประชุมระดับโลกครั้งที่ 12 สำหรับวิศวกรรมแผ่นดินไหว
[4] Ricciardelli, F.; Pizzimenti, A.D.; Mattei, M. (2003). การควบคุมมวลหน่วงปรับค่าแบบพาสซีฟและแอคทีฟของการตอบสนองของอาคารสูงต่อลมกระโชกแรง. Eng. Struct., 25, 1199–1209
[5] Yang, N.Y.; Agrawal, A.K.; Samali, B.; Wu, J.C. Benchmark Problem for Response Control of Wind-Excited Tall Buildings. J. Eng. Mech. 2004, 130, 437–446.
[6] Watakabe, M.; Tohdp, M.; Chiba, O.; Izumi, N.; Ebisawa, H.; Fujita, T. Response control performance of a hybrid mass damper applied to a tall building. Earthq. Eng. Struct. Dyn. 2001, 30, 1655–1676.
[7] Tan, P.; Liu, Y.; Zhou, F.; Teng, J. Hybrid Mass Dampers for Canton Tower. CTBUH J. 2012, 24–29.
[8] Soong, T.T. “Active Structural Control: Theory and Practice”; John Wiley & Sons, Inc.: New York, NY, USA, 1990
[9] Preumont, A.; Kazuto, S. (2008). “Active Control of Structures”, Wiley, Padstow
แชร์โพสต์นี้
แชร์โพสต์นี้
แหล่งข้อมูลเพิ่มเติม
หากคุณต้องการข้อมูลเพิ่มเติมเกี่ยวกับหัวข้อนี้
กรุณาติดต่อสอบถามเราได้เสมอ
วิศวกรโครงการของเราจะตอบกลับคุณโดยเร็วที่สุด
แหล่งข้อมูลเพิ่มเติม
หากคุณต้องการข้อมูลเพิ่มเติมเกี่ยวกับหัวข้อนี้
กรุณาติดต่อสอบถามเราได้เสมอ
วิศวกรโครงการของเราจะตอบกลับคุณโดยเร็วที่สุด